ć°ČŮźĽćžāĶāĹĀuEggbotĀvāŐĖ{ĎŐÉtÉĆĀ[ÉÄ
ĀiServoā‚ĀAÉlÉWóřĀAäÓĒ¬ā»ā«āūŹúā≠Āj
É\Ā[ÉXāūēŌćXā∑āťéĖā…āśāŃāńĀuServoĀvāūć∂ČEā«āŅāÁā…āŗéśāŤētāĮāÁāÍāťāśā§ā…ēŌćXĀB
ĀuServoĀvāūéśāŤētāĮā»āĘē–ϧā…āÕĀAāĽāŐÉlÉWĆäā…ĀuÉyÉďÉAĀ[ÉÄĀvā∆í‘āťĀA
é„āĘĀuąÝāŃí£āŤÉoÉlĀvāūéśāŤētāĮāťĀB
ĀiĒĖāĘäkāŐÉ^É}ÉSā…0.1É~Éäā»ā«āŐć◊āĘÉyÉďāŇē`ČśāĶāĹćŘĀAÉyÉďźśā™äkā…źŕźGāĶāĹŹuä‘ĀAäkā…ĆäāūäJāĮāńāĶā‹ā§éĖā™ā†āŃāĹĀB
ĆĽć›āÕÉoÉlāŐĎ„āŪāŤā…ĀAé„āĘóÕāŇĀAźLā—āŐó«āĘó÷ÉSÉÄāūóėópāĶāńāĘāťĀBĀj
źĽćžā∑āťćŘāÕĀA3DÉvÉäÉďÉ^Ā[āŇąůćŁāŇāęāťāśā§ā…äeÉpĀ[ÉcāūĀustlĀvĆ`éģāŇÉGÉNÉXÉ|Ā[Égā∑āťēKóvā™ā†āťĀB
ÉtÉĆĀ[ÉÄĖ{ĎŐāūćáĒ¬āŇćžāťŹÍćáĀAéśāŤētāĮą íuāŐźcāūź≥ämā…ćáāŪā∑ēKóvā™ā†āťā™ĀAāĽāÍāŔā«ďÔāĶāĘČŃćHēĒē™āÕĖ≥āĘĀB
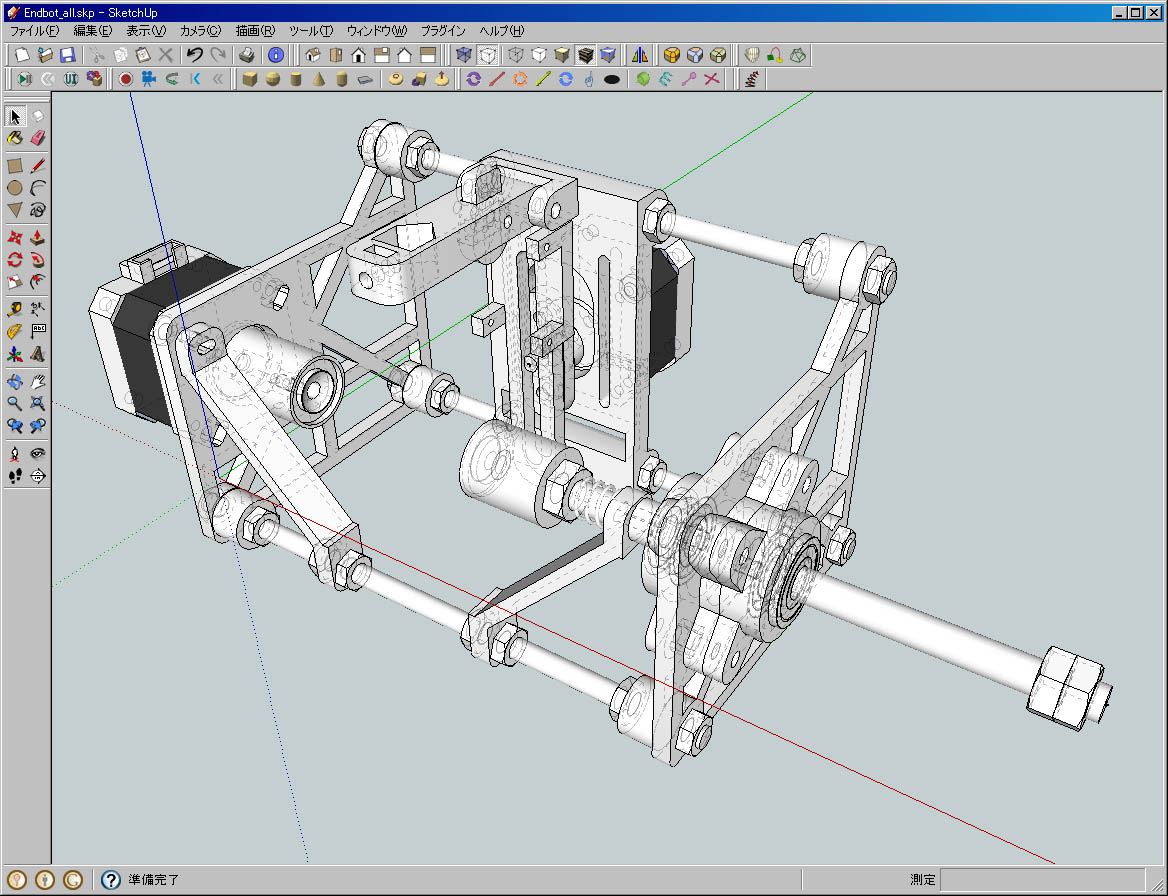
ć°ČŮāÕĀAÉyÉďÉAĀ[ÉÄāŐŹłć~ā…äýíŤāŐÉoÉlĀiÉtÉBÉČÉĀÉďÉgāūSéöĆ`ā…ÉvÉäÉďÉgāĶāĹāŗāŐĀjāūóėópāĻāłĀAĀuServoĀvā…ēČíSā™ā©ā©āÁā»āĘāśā§ĀAéĚāŅŹ„āįāťāĺāĮāŐć\ĎĘā…ēŌćXāĶāńā†āŤĀAāĽāŐāĹāŖServoāŐéśāŤētāĮā™Ź„Čļčtā…ā»āťĀB
źĽćžāĶāĹÉnĀ[ÉhāŐä¬čęā…ćáāŪāĻāńĀAĀuInkscapeĀvāŐĀucontext.pyĀvāūą»ČļāŐāśā§ā…ŹĎāęä∑ā¶āńóėópāĶāĹā™ĀAā†ā≠ā‹āŇƬźlāŐä¬čęā…ćáāŪāĻāńēŌćXāĶāĹāŗāŐā»āŐāŇĀAčKíŤāŐÉ\Ā[ÉXāūāĽāŐā‹ā‹óėópā∑āťéĖā™Ė]ā‹āĶāĘĀB
ĀiĀ¶ÉyÉďĆūä∑éěā…ÉAĀ[ÉÄā™ďģā©ā»āĘāśā§ĀAŹŪā…źßďģāŐĆÝāĘāĹŹůĎ‘āŇí‚é~ā∑āťĀBĀj
ďYētāĶāĹÉ\Ā[ÉXāŐÉčĀ[ÉgĀiXPāŐŹÍćáĀj
C:\Program Files\Inkscape\share\extensions\unicorn
ĖYāÍā™āŅā»āŐā™ĀAÉ\Ā[ÉXŹĎāęä∑ā¶Ć„ā…ĀAĎOā…ÉRÉďÉpÉCÉčā≥āÍāńāĘāĹďĮĖľāŐĀupycĀvÉtÉ@ÉCÉčāūćŪŹúāĶāńĀuInkscapeĀvāūćńčNďģāĶā»āĮāÍāőćXźVāĶāĹÉ\Ā[ÉXāŐďŗóeā™ĒĹČfā≥āÍā»āĘéĖĀB
ŹĎāęä∑ā¶āĹÉ\Ā[ÉXĀipyĀjāŐÉRÉďÉpÉCÉčĀEÉtÉ@ÉCÉčĀipycĀjāÕĀAčNďģéěā…Ď∂ć›āĶā»āĮāÍāőé©ďģāŇź∂ź¨ā≥āÍāťĀB
Āucontext.pyĀv
----------------------------------------------------------------from math import *
import sys
class GCodeContext:
def __init__(self, xy_feedrate, z_feedrate, start_delay, stop_delay, pen_up_angle, pen_down_angle, z_height, finished_height, x_home, y_home, register_pen, num_pages, continuous, file):
self.xy_feedrate = xy_feedrate
self.z_feedrate = z_feedrate
self.start_delay = start_delay
self.stop_delay = stop_delay
self.pen_up_angle = pen_up_angle
self.pen_down_angle = pen_down_angle
self.z_height = z_height
self.finished_height = finished_height
self.x_home = x_home
self.y_home = y_home
self.register_pen = register_pen
self.num_pages = num_pages
self.continuous = continuous
self.file = file
self.drawing = False
self.last = None
self.preamble = [
"(Scribbled version of %s @ %.2f)" % (self.file, self.xy_feedrate),
"( %s )" % " ".join(sys.argv),
"G21 (metric ftw)",
"G90 (absolute mode)",
"G92 X%.2f Y%.2f Z%.2f (you are here)" % (self.x_home, self.y_home, self.z_height),
""
]
self.postscript = [
"",
"(end of print job)",
"M300 S%0.2F (pen up)" % self.pen_up_angle,
"G4 P%d (wait %dms)" % (self.stop_delay, self.stop_delay),
"M300 S255 (turn off servo)",
"G1 X0 Y0 F%0.2F" % self.xy_feedrate,
"G1 Z%0.2F F%0.2F (go up to finished level)" % (self.finished_height, self.z_feedrate),
"G1 X%0.2F Y%0.2F F%0.2F (go home)" % (self.x_home, self.y_home, self.xy_feedrate),
"M300 S%0.2F (pen up)" % self.pen_up_angle,
"G4 P%d (wait %dms)" % (self.stop_delay, self.stop_delay),
" (M18 drives off)",
]
self.registration = [
"M300 S%d (pen down)" % (self.pen_down_angle),
"G4 P%d (wait %dms)" % (self.start_delay, self.start_delay),
"M300 S%d (pen up)" % (self.pen_up_angle),
"G4 P%d (wait %dms)" % (self.stop_delay, self.stop_delay),
"M18 (disengage drives)",
"M01 (Was registration test successful?)",
"M17 (engage drives if YES, and continue)",
""
]
self.sheet_header = [
"(start of sheet header)",
"G92 X%.2f Y%.2f Z%.2f (you are here)" % (self.x_home, self.y_home, self.z_height),
]
if self.register_pen == 'true':
self.sheet_header.extend(self.registration)
self.sheet_header.append("(end of sheet header)")
self.sheet_footer = [
"(Start of sheet footer.)",
"M300 S%d (pen up)" % (self.pen_up_angle),
"G4 P%d (wait %dms)" % (self.stop_delay, self.stop_delay),
"G91 (relative mode)",
"G0 Z15 F%0.2f" % (self.z_feedrate),
"G90 (absolute mode)",
"G0 X%0.2f Y%0.2f F%0.2f" % (self.x_home, self.y_home, self.xy_feedrate),
"M01 (Have you retrieved the print?)",
"(machine halts until 'okay')",
"G4 P%d (wait %dms)" % (self.start_delay, self.start_delay),
"G91 (relative mode)",
"G0 Z-15 F%0.2f (return to start position of current sheet)" % (self.z_feedrate),
"G0 Z-0.01 F%0.2f (move down one sheet)" % (self.z_feedrate),
"G90 (absolute mode)",
"M18 (disengage drives)",
"(End of sheet footer)",
]
self.loop_forever = [ "M30 (Plot again?)" ]
self.codes = []
def generate(self):
if self.continuous == 'true':
self.num_pages = 1
codesets = [self.preamble]
if (self.continuous == 'true' or self.num_pages > 1):
codesets.append(self.sheet_header)
elif self.register_pen == 'true':
codesets.append(self.registration)
codesets.append(self.codes)
if (self.continuous == 'true' or self.num_pages > 1):
codesets.append(self.sheet_footer)
if self.continuous == 'true':
codesets.append(self.loop_forever)
for codeset in codesets:
for line in codeset:
print line
else:
for p in range(0,self.num_pages):
for codeset in codesets:
for line in codeset:
print line
for line in self.postscript:
print line
def start(self):
self.codes.append("M300 S%0.2F (pen down)" % self.pen_down_angle)
self.codes.append("G4 P%d (wait %dms)" % (self.start_delay, self.start_delay))
self.drawing = True
def stop(self):
self.codes.append("M300 S%0.2F (pen up)" % self.pen_up_angle)
self.codes.append("G4 P%d (wait %dms)" % (self.stop_delay, self.stop_delay))
self.drawing = False
def go_to_point(self, x, y, stop=False):
if self.last == (x,y):
return
if stop:
return
else:
if self.drawing:
self.codes.append("M300 S%0.2F (pen up)" % self.pen_up_angle)
self.codes.append("G4 P%d (wait %dms)" % (self.stop_delay, self.stop_delay))
self.drawing = False
self.codes.append("G1 X%.2f Y%.2f F%.2f" % (x,y, self.xy_feedrate))
self.last = (x,y)
def draw_to_point(self, x, y, stop=False):
if self.last == (x,y):
return
if stop:
return
else:
if self.drawing == False:
self.codes.append("M300 S%0.2F (pen down)" % self.pen_up_angle)
self.codes.append("G4 P%d (wait %dms)" % (self.start_delay, self.start_delay))
self.drawing = True
self.codes.append("G1 X%0.2f Y%0.2f F%0.2f" % (x,y, self.xy_feedrate))
self.last = (x,y)

ďYētÉtÉ@ÉCÉč

