Ӣ^–вӮҫӮзӮҜӮМҒuGRBLҒvӮЖӮИӮБӮДӮөӮЬӮБӮҪӮӘҒAғҢҒ[ғUҒ[ҒAғ~ғӢҒAғyғ“ҒEҒE“ҷҒXҒAғwғbғhӮЙҺжӮи•tӮҜӮйғIғvғVғҮғ“ӮӘҲЩӮИӮкӮОҒAҒuғnҒ[ғhғEғFғAҒvӮМҚ\җ¬ӮЙӮ ӮнӮ№ӮҪҒAғ\Ғ[ғXӮвғAғvғҠӮМ‘I‘рӮа—]ӢVӮИӮӯӮіӮкӮйҒB
ҒuGRBLҒvӮр—ҳ—pӮөӮДҒA3DғvғҠғ“ғ^Ғ[ӮрҒuӮЁҠGӮ©Ӯ«ғ}ғVғ“ҒvӮЙӮаҒuғҢҒ[ғUҒ[үБҚHӢ@ҒvӮЙӮа•Пү»ӮіӮ№ӮйҺ–ӮӘҸo—ҲӮйӮҪӮЯҒA–Ъ“IӮӘ–ҫҠmӮЕӮИӮўӮЖҒAҚ¬—җӮМҢҙҲцӮЙӮаӮИӮБӮДӮөӮЬӮӨҒB
ҚЎүсҒAҒuUNOҒvӮЙҸ‘Ӯ«ҚһӮсӮҫ Servo ‘Оүһ GRBL ӮМҗЭ’иҺ–ҚҖӮЕ•ӘӮ©ӮБӮҪҺ–
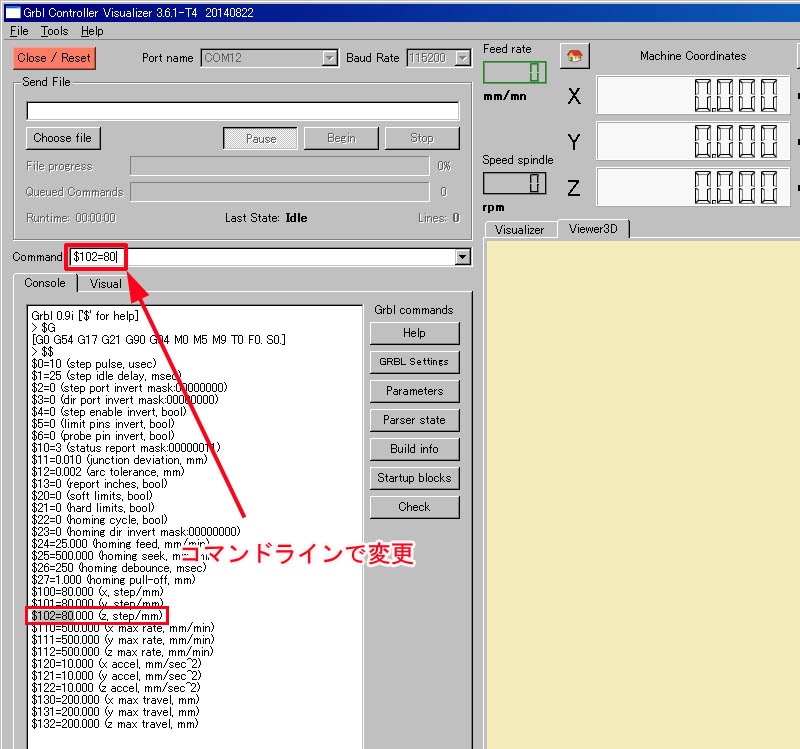
ҒҰҒuUniversalGcodeSenderҒvӮМғRғ}ғ“ғhғүғCғ“ӮвҒAҒuGrblControllerҒvӮМғRғ}ғ“ғhғүғCғ“ӮЙҒu$$ҒvӮр‘ЕӮҝҚһӮсӮЕ•\ҺҰӮіӮ№ӮҪӮаӮМҒB
ҸЪӮөӮўҗа–ҫӮН‘јӮМғTғCғgӮЙӮЁ”CӮ№Ӯ·ӮйӮұӮЖӮЙҒB
Ғi”х–Yҳ^ӮЙӮИӮзӮИӮўӮБӮДҒIҒj
$0=10 (step pulse, usec)
$1=25 (step idle delay, msec)
$2=0 (step port invert mask:00000000)
$3=0 (dir port invert mask:00000000)
$4=0 (step enable invert, bool)
$5=0 (limit pins invert, bool)
$6=0 (probe pin invert, bool)
$10=3 (status report mask:00000011)
$11=0.010 (junction deviation, mm)
$12=0.002 (arc tolerance, mm)
$13=0 (report inches, bool)
$20=0 (soft limits, bool)
$21=0 (hard limits, bool)
$22=0 (homing cycle, bool)
$23=0 (homing dir invert mask:00000000)
$24=25.000 (homing feed, mm/min)
$25=500.000 (homing seek, mm/min)
$26=250 (homing debounce, msec)
$27=1.000 (homing pull-off, mm)
$100=250.000 (x, step/mm)
$101=250.000 (y, step/mm)
$102=250.000 (z, step/mm)
$110=500.000 (x max rate, mm/min)
$111=500.000 (y max rate, mm/min)
$112=500.000 (z max rate, mm/min)
$120=10.000 (x accel, mm/sec^2)
$121=10.000 (y accel, mm/sec^2)
$122=10.000 (z accel, mm/sec^2)
$130=200.000 (x max travel, mm)
$131=200.000 (y max travel, mm)
$132=200.000 (z max travel, mm)
ӮұӮМҗЭ’иӮ©Ӯз•ӘӮ©ӮйӮжӮӨӮЙҒAӮұӮМӮЬӮЬҗ»Қм—\’иӮМҒuAxiDrawҒvӮрҺ©ҚмӮөӮД•`үжӮрҺАҚsӮөӮҪҸкҚҮҒAғnҒ[ғhғEғFғAӮЖӮМҗ®ҚҮҗ«ӮӘҺжӮкӮДӮўӮИӮўҸкҚҮҒA”ЯҺSӮИҢӢүКӮрҸөӮӯӮұӮЖӮӘ—\‘zӮіӮкӮйҒB
ҚKӮўӮИҺ–ӮЙҒAArduinoIDEӮрүоӮіӮёҒuGRBLҒvғRғ“ғgғҚҒ[ғӢғ\ғtғgӮМғRғ}ғ“ғhғүғCғ“Ӯ©ӮзҒuUNOҒvӮЦӮМҸ‘Ӯ«ҚһӮЭҒi$100=XXӮИӮЗҒjӮӘҺg—pҸo—ҲӮйӮҪӮЯҒAғ^ғCғ~ғ“ғOғvҒ[ғҠҒ[ӮМҺ•җ”ӮЙҚҮӮнӮ№ӮҪғXғeғbғv’Іҗ®ӮИӮЗӮМҒA–К“|ӮИғXғPғbғ`ӮрҳMӮйӢ@үпӮНҢёӮиӮ»ӮӨӮЕӮ ӮйҒBҒiүәӮМүж‘ңҒj