‹ةچ׃yƒ“—p‚ة
ArduinoپEServo’x‰„ژٹشپiPWMپj‚ج’²گ®’†
ƒyƒ“ڈمڈ¸‚ً‘پ‚
ƒyƒ“‰؛چ~‚ح’x‚
‘O‚ة‚±‚جƒyƒ“‚ً—ک—p‚µ‚ؤپi0.2ƒ~ƒٹ‚جچ×پjƒ^ƒ}ƒS‚جٹk‚ًٹ„‚ء‚½ŒoŒ±‚ ‚èپI
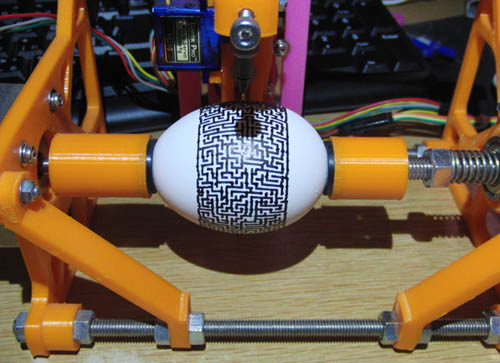
—lژqŒ©‚ب‚ج‚إƒyƒ“Œإ’èپiڈ‚µƒOƒ‰ƒOƒ‰پIپj‚ئگcڈo‚µ‚ح‚â‚ء‚ؤ‚ب‚¢‚ھ‚¤‚ـ‚‚¢‚ء‚ؤ‚éپB
’†’ِ“x‚ج–ہکH‚¾‚ھپAƒtƒBپ[ƒhƒŒپ[ƒg‚ج’²گ®ژں‘و‚إ‚ح0.1ƒ~ƒٹ‚ج‹ةچ׃yƒ“‚إ‹گ‘ه–ہکH‚ـ‚إ‚¢‚¯‚»‚¤‚¾پB
ƒyƒ“گو‚ج‘¾‚³‚©‚炱‚ج–§“x‚ھŒہٹEپBپ@
“Y•t‚µ‚½zipƒtƒ@ƒCƒ‹پiSVGپj‚حژہچغ‚ةƒvƒٹƒ“ƒg‚ةژg‚ء‚½–ہکHپB
‚¨‚»‚ç‚‚¾‚ھپAچ،–é‚ج—؟—‚إ–³ژœ”ك‚ةٹ„‚ç‚ê‚é—\ٹ´پB
ƒ\پ[ƒX”ُ–Y
config.h “à‚ج’è‹`
#define SERVO_PIN_1 11
#define SERVO_DELAY 75 // (ms) delay between position changes
پ`
// Optional output
#define ALT_PIN 2
پ`
SoftwareServo.h
#ifndef SoftwareServo_h
#define SoftwareServo_h
#include "Arduino.h"
#include
class SoftwareServo
{
private:
uint8_t pin;
uint8_t angle; // in degrees
uint16_t pulse0; // pulse width in TCNT0 counts
uint8_t min16; // minimum pulse, 16uS units (default is 34)
uint8_t max16; // maximum pulse, 16uS units, 0-4ms range (default is 150)
class SoftwareServo *next;
static SoftwareServo* first;
public:
SoftwareServo();
uint8_t attach(int); // attach to a pin, sets pinMode, returns 0 on failure, won't
// position the servo until a subsequent write() happens
void detach();
void write(int); // specify the angle in degrees, 0 to 180
uint8_t read();
uint8_t attached();
void setMinimumPulse(uint16_t); // pulse length for 0 degrees in microseconds, 540uS default
void setMaximumPulse(uint16_t); // pulse length for 180 degrees in microseconds, 2400uS default
static void refresh(); // must be called at least every 50ms or so to keep servo alive
// you can call more often, it won't happen more than once every 20ms
};
#endif
SoftwareServo.cpp
#include "SoftwareServo.h"
SoftwareServo *SoftwareServo::first;
#define NO_ANGLE (0xff)
SoftwareServo::SoftwareServo() : pin(0), angle(NO_ANGLE), pulse0(0), min16(34), max16(150), next(0)
{}
void SoftwareServo::setMinimumPulse(uint16_t t)
{
min16 = t/16;
}
void SoftwareServo::setMaximumPulse(uint16_t t)
{
max16 = t/16;
}
uint8_t SoftwareServo::attach(int pinArg)
{
pin = pinArg;
angle = NO_ANGLE;
pulse0 = 0;
next = first;
first = this;
digitalWrite(pin, 0);
pinMode(pin, OUTPUT);
return 1;
}
void SoftwareServo::detach()
{
for (SoftwareServo **p=&first; *p!=0; p=&((*p)->next) ) {
if (*p == this) {
*p = this->next;
this->next = 0;
return;
}
}
}
void SoftwareServo::write(int angleArg)
{
if (angleArg < 0) angleArg = 0;
if (angleArg > 180) angleArg = 180;
angle = angleArg;
// bleh, have to use longs to prevent overflow, could be tricky if always a 16MHz clock, but not true
// That 64L on the end is the TCNT0 prescaler, it will need to change if the clock's prescaler changes,
// but then there will likely be an overflow problem, so it will have to be handled by a human.
pulse0 = (min16*16L*clockCyclesPerMicrosecond() + (max16-min16)*(16L*clockCyclesPerMicrosecond())*angle/180L)/64L;
}
uint8_t SoftwareServo::read()
{
return angle;
}
uint8_t SoftwareServo::attached()
{
for (SoftwareServo *p=first; p!=0; p=p->next ) {
if (p == this) return 1;
}
return 0;
}
void SoftwareServo::refresh()
{
uint8_t count = 0, i = 0;
uint16_t base = 0;
SoftwareServo *p;
static unsigned long lastRefresh = 0;
unsigned long m = millis();
// if we haven't wrapped millis, and 20ms have not passed, then don't do anything
if (m >= lastRefresh && m < lastRefresh + 20) return;
lastRefresh = m;
for (p=first; p!=0; p=p->next ) if (p->pulse0) count++;
if (count == 0) return;
// gather all the SoftwareServos in an array
SoftwareServo *s[count];
for (p=first; p !=0; p=p->next ) if (p->pulse0) s[i++] = p;
// bubblesort the SoftwareServos by pulse time, ascending order
for(;;) {
uint8_t moved = 0;
for (i = 1; i < count; i++) {
if (s[i]->pulse0 < s[i-1]->pulse0) {
SoftwareServo *t = s[i];
s[i] = s[i-1];
s[i-1] = t;
moved = 1;
}
}
if (!moved) break;
}
// turn on all the pins
// Note the timing error here... when you have many SoftwareServos going, the
// ones at the front will get a pulse that is a few microseconds too long.
// Figure about 4uS/SoftwareServo after them. This could be compensated, but I feel
// it is within the margin of error of software SoftwareServos that could catch
// an extra interrupt handler at any time.
for (i=0; ipin, 1);
uint8_t start = TCNT0;
uint8_t now = start;
uint8_t last = now;
// Now wait for each pin's time in turn..
for (i=0; i
uint16_t go = start + s[i]->pulse0;
// loop until we reach or pass 'go' time
for (;;) {
now = TCNT0;
if (now < last) base += 256;
last = now;
if (base+now > go) {
digitalWrite(s[i]->pin, 0);
break;
}
}
}
}
// ----------Servo’x‰„’²گ®-------------
void moveServo(double value)
{
const int incrementDelay = SERVO_DELAY;
const int currentAngle = servo.read();
servoEnabled = true;
if (value < 0.) value = 0.;
if (value > 180.) value = 180.;
if (value > currentAngle) //
{
for (int angle=currentAngle; angle
{
servo.write(angle);
delay (incrementDelay * 0.6);
SoftwareServo::refresh();
}
}
else if (value < currentAngle) //
if (value < currentAngle) //
{
for (int angle=currentAngle; angle>value; angle--) // ٹp“xƒfƒNƒٹƒپƒ“ƒg
{
servo.write(angle);
delay (incrementDelay * 0.5);
SoftwareServo::refresh();
}
}
{
servo.write((int)value);
}
// nothing to be done if value == currentAngle
}
//پ@-------------------------------------------------------
پ`

“Y•tƒtƒ@ƒCƒ‹


