|
پuGrblGruپv‚ج“ْ–{Œê‰»پB
ˆب‰؛پAژ©Œبگس”C‚ة‰—‚¢‚ؤپI
پ¦–\‘–‚ب‚اپA‚à‚µ‚à‚ج‚ئ‚«‚ح“Y•t‚µ‚½ƒtƒ@ƒCƒ‹‚ًچيڈœ‚·‚邾‚¯پB
‚±‚±‚ة“Y•t‚µ‚½zipƒtƒ@ƒCƒ‹‚ً‰ً“€‚µپAƒAƒvƒٹ‚ًƒCƒ“ƒXƒgپ[ƒ‹‚µ‚½ƒtƒHƒ‹ƒ_‚ة“ٹ‚°“ü‚ê‚éپBپi3ƒtƒ@ƒCƒ‹پj
ƒCƒ“ƒXƒgپ[ƒ‹پEƒpƒX—لپF
C:\Program Files (x86)\toe\GrblGru
‚ب‚اپB
•½چs‚µ‚ؤ
C:\ProgramData\GrblGru
‚ب‚ا‚ئ‚µ‚½ƒpƒX‚ةƒfپ[ƒ^ƒtƒHƒ‹ƒ_‚ھچىگ¬‚³‚ê‚é‚ج‚إپA“¯‚¶3‚آ‚جƒtƒ@ƒCƒ‹‚ً“ٹ‚°“ü‚ê‚ؤ‚¨‚پB
“ْ–{Œê‰»‚ح‚±‚ê‚إڈI‚ي‚èپB
“Y•t‚µ‚½پuLanguage_jp.txtپv‚حپuUnicodeپvƒ^ƒCƒv‚إ•زڈW‰آ”\‚¾‚ھپA–|–َ‚µ‚ؤ‚ح‚¢‚¯‚ب‚¢ƒڈپ[ƒh‚ھ‘¶چف‚·‚é‚ج‚إ—\‚كƒRƒsپ[‚ًچىگ¬‚·‚é‚ب‚اپAچ×گS‚ج’چˆس‚ھ•K—vپB
گê–ه“I‚ة‰ًگà‚·‚éژ–‚ھ‚إ‚«‚ب‚¢‚ج‚إپuWikiپv‚ب‚ا‚ًژQڈئ‚·‚éژ–‚ً‚¨‚·‚·‚كپB
‹N“®Œم‚ةپuƒGƒLƒXƒgƒ‰پvƒپƒjƒ…پ[‚جپuLanguageپv‚جچ€–ع‚ً‘I‘ًپB
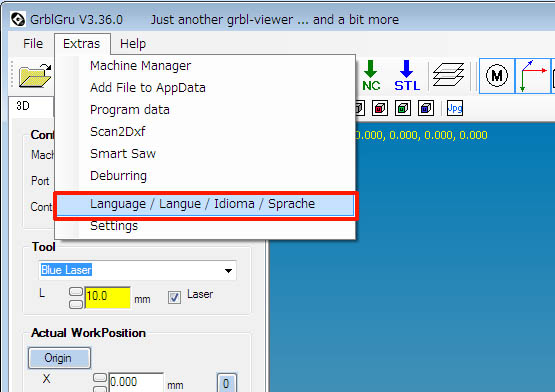
“ْ–{Œê‰»ƒtƒ@ƒCƒ‹‚ً“ü‚ꂽ‚ ‚ئ‚حپuJapaneseپv‚جچ€–ع‚ھ’ا‰ء‚³‚ê‚é‚ج‚إƒ`ƒFƒbƒN‚ً“ü‚ê‚ؤ“ْ–{Œê‰»‚·‚éپB

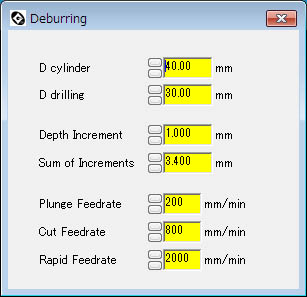
‰pŒê•\ژ¦‚جڈêچ‡
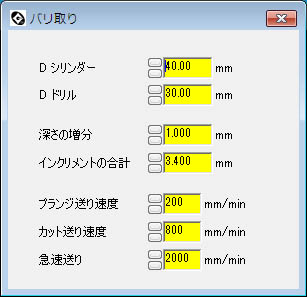
“ْ–{Œê‰»‚³‚ê‚é‚ئپuGoogle–|–َپv‚ئ‚حŒ¾‚¦—‰ً‚µ‚â‚·‚¢پB
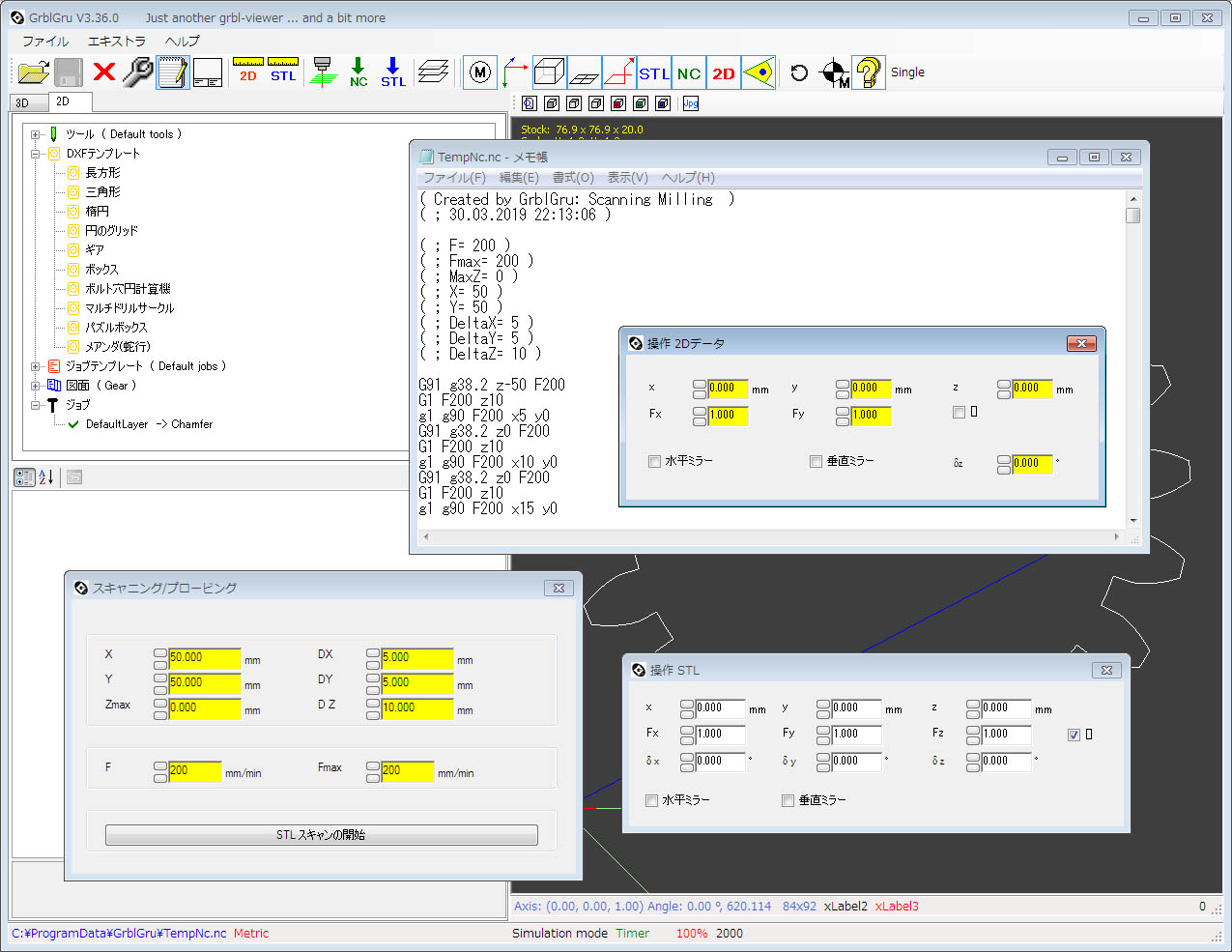
2Dƒfپ[ƒ^چىگ¬چى‹ئ‰و–ت

‚»‚ج‘¼‚جƒpƒ‰ƒپپ[ƒ^ƒ_ƒCƒAƒچƒO
ƒ}ƒVƒ“‚جگف’è
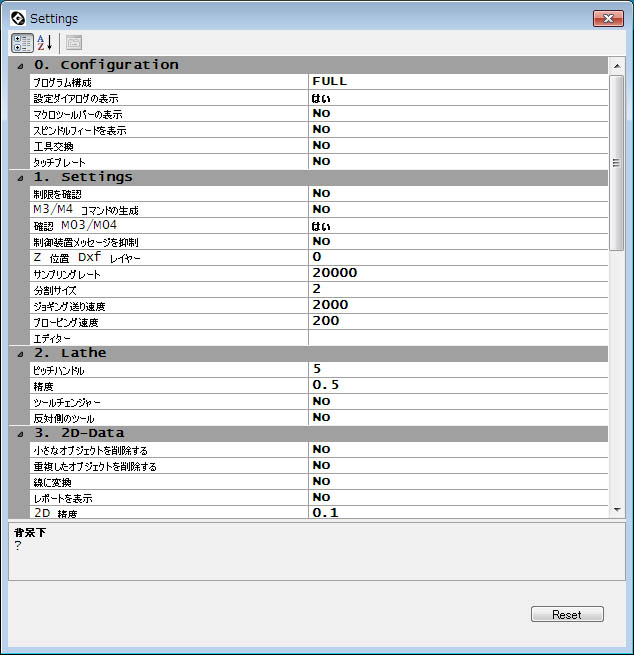
‚»‚ج‘¼پA‘€چى‚ةٹض‚·‚éƒRƒ“ƒgƒچپ[ƒ‰‚ب‚ا‚حƒwƒ‹ƒv‚ب‚ا‚ً—ک—p‚µپAژٹش‚ً‚©‚¯‚ؤ—‰ً‚·‚é•K—v‚ھ‚ ‚éپB
ƒIƒٹƒWƒiƒ‹ƒVƒXƒeƒ€
https://www.grblgru.com/
 “Y•tƒtƒ@ƒCƒ‹
|