|
•،ژG‚ب“®چى‚ً—v‚µ‚ب‚¢Œہ‚èپASketchyPhysics‚جƒcپ[ƒ‹ƒoپ[‚ة•\ژ¦‚³‚ê‚ؤ‚¢‚é‹@”\‚¾‚¯‚إ–w‚اژ–‘«‚è‚ؤ‚µ‚ـ‚¤‚ھپAڈ‚µ“¥‚فچ‚ٌ‚إ پuSketchyPhysicsWikiپv‚ج’†‚ًڈœ‚‚ئپAچX‚ة•ض—ک‚بژg‚¢•û‚ھڈذ‰î‚³‚ê‚ؤ‚¢‚éپB
‹ح‚©پA10چs‚ة‚à–‚½‚ب‚¢ƒXƒNƒٹƒvƒg‚ً‹Lڈq‚·‚邾‚¯‚إپAپhچX‚ة•ض—کپh‚بژg‚¢•û‚ھ‚إ‚«‚é‚ب‚çژg‚ي‚ب‚¢ژè‚ح–³‚¢پB
چ،‰ٌ‚حپAچإ‚àگg‹ك‚ئٹ´‚¶‚ç‚ê‚é
پugetVarپv‚ئپAپusetVarپv‚ج“ٌ‚آ‚جƒXƒNƒٹƒvƒg‚ً—p‚¢پAژ蔲‚«‚ج‘م–¼ژŒ‚ئ‚ب‚ء‚½پAپuٹد‰¹”àپv‚إژژ‚µ‚ؤ‚ف‚½پB
گف’è‚حپAˆب‰؛‚ج’ت‚è
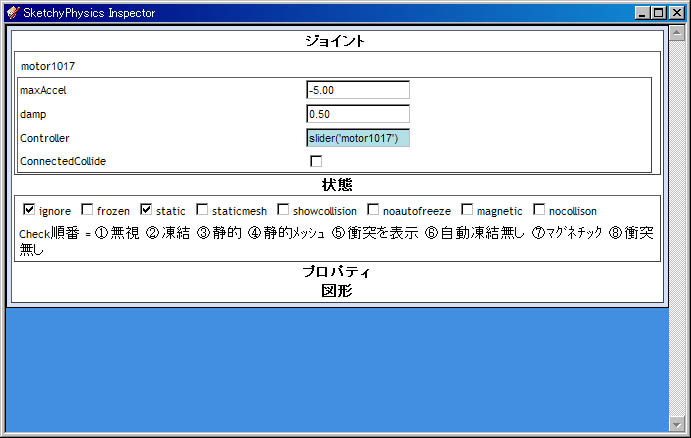
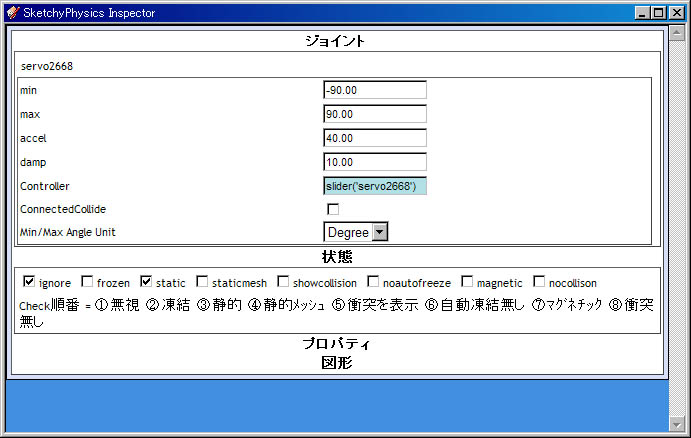
”à‚جژ²‚ئ‚µ‚ؤƒZƒbƒg‚·‚éپuServoپv‚جپuControllerپv‚ةپA’l‚ًژو“¾‚·‚邽‚كپA
getVar("tobira01")
‚ئ‹Lڈq‚·‚éپB
 پ¦’تڈي‚حپAژ²‚ًگف’肵‚½’iٹK‚إپhslider('servoپHپHپH')پh‚ھٹù’è’l‚ئ‚µ‚ؤƒZƒbƒg‚³‚ê‚ؤ‚‚é‚ج‚إپA‚±‚ê‚ًڈم‹L‚ةڈ‘‚«ٹ·‚¦‚éپB
پ¦’تڈي‚حپAژ²‚ًگف’肵‚½’iٹK‚إپhslider('servoپHپHپH')پh‚ھٹù’è’l‚ئ‚µ‚ؤƒZƒbƒg‚³‚ê‚ؤ‚‚é‚ج‚إپA‚±‚ê‚ًڈم‹L‚ةڈ‘‚«ٹ·‚¦‚éپB
ƒJƒbƒR“à‚جپ@"tobira01"پ@‚حپAژ©•ھ‚ھژ¯•ت‚µˆص‚¢”Cˆس‚ج–¼‘O‚ً•t‚¯‚ç‚ê‚é‚ھپAپugetVarپv‚حپAپuServoپv‚ب‚ا‚جƒWƒ‡ƒCƒ“ƒgƒcپ[ƒ‹‚©‚ç’l‚ًژو“¾‚·‚邽‚ك‚جŒˆ‚ـ‚è‚جƒXƒNƒٹƒvƒgپBپiŒˆ‚ـ‚è‚ب‚ج‚إپAچl‚¦‚é•K—v‚ح‚ب‚‚½‚¾‹Lڈq‚·‚é‚ج‚فپBپj
‘¼‚جگف’è‚إپA
پuaccelپv‚ئپAپudampپv‚جگف’è‚حٹ„‚ئڈd—v‚إپA
ƒIƒuƒWƒFƒNƒg‚ً“®‚©‚·—ح‚â‘پ‚³‚حپuaccelپv‚إگف’肵پA‚»‚ê‚ة’ïچR‚ً‰ء‚¦‚é‚ج‚ھپudampپv‚ج–ًٹ„‚ئŒ¾‚ء‚½‚ئ‚±‚ëپB
پudampپv‚جگف’è’l‚ًچ‚‚‚·‚é‚ئپA”à‚جٹJ•آ‚ً‚ن‚ء‚‚è‚ئ“®‚©‚·ژ–‚ھ‚إ‚«‚éپB
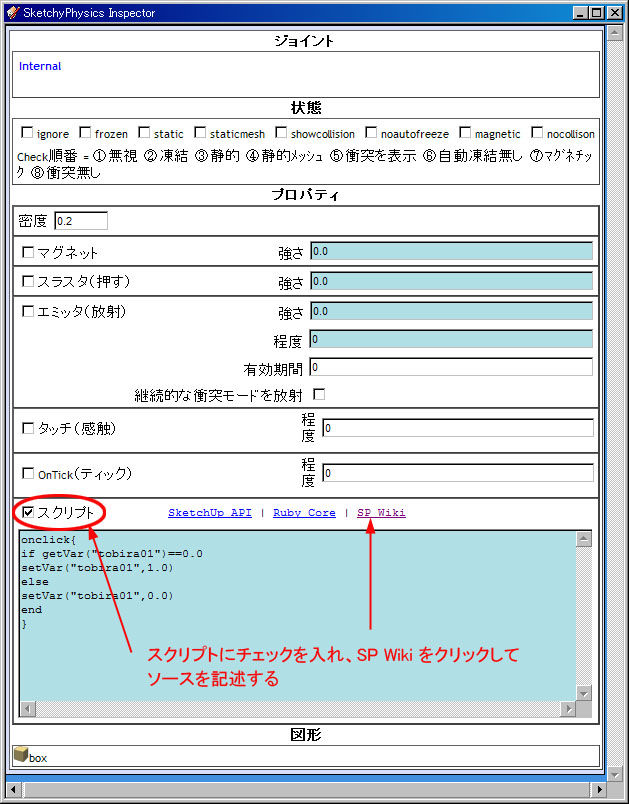
Œم‚حپA“®‚©‚³‚ê‚é•û‚جƒIƒuƒWƒFƒNƒg‚ةپAƒAƒNƒVƒ‡ƒ“‚ة‰‚¶‚½گ”چs‚جƒXƒNƒٹƒvƒg‚ً‹Lڈq‚·‚邾‚¯پB
‰؛‚حپAƒ}ƒEƒX‚جƒNƒٹƒbƒNƒCƒxƒ“ƒg‚ً—p‚¢‚½ˆê”ت“I‚ب‹LڈqپB
پiٹد‰¹”à‚جڈêچ‡پA‘خڈج‚ة“®‚2‚آ‚ج”à‚ة‚ا‚؟‚ç‚à“¯‚¶ƒXƒNƒٹƒvƒg‚ً‹Lڈq‚·‚éپj
onclick{
if getVar("tobira01")==0.0
setVar("tobira01",1.0)
else
setVar("tobira01",0.0)
end
}
پuInspectorپv‚جƒ_ƒCƒAƒچƒOپ@چإ‰؛•”‚ة•\ژ¦‚³‚ê‚ؤ‚¢‚éƒXƒNƒٹƒvƒg‚جƒ`ƒFƒbƒNƒ{ƒbƒNƒX‚ةƒ`ƒFƒbƒN‚ً“ü‚ê‚é‚ئپAƒeƒLƒXƒgƒ{ƒbƒNƒX‚ھŒ»‚ê‚é‚ج‚إپAڈم‚جƒXƒNƒٹƒvƒg‚ًƒRƒsƒy‚µ‚ؤ“\‚è•t‚¯‚邾‚¯‚إ—ا‚¢پB
‚½‚ء‚½‚±‚ꂾ‚¯‚إ“®چى‚·‚éپB
 پ¦ƒwƒ‹ƒv‚âژQچl‚ھ•K—v–³‚¢ڈêچ‡پAپuSP Wikiپv‚ًƒNƒٹƒbƒN‚µ‚ب‚‚ؤ‚à‘¼‚ج‹َ”’‚ًƒNƒٹƒbƒN‚µ‚ؤ‚àƒeƒLƒXƒgƒ{ƒbƒNƒX‚ح•\ژ¦‚³‚ê‚é
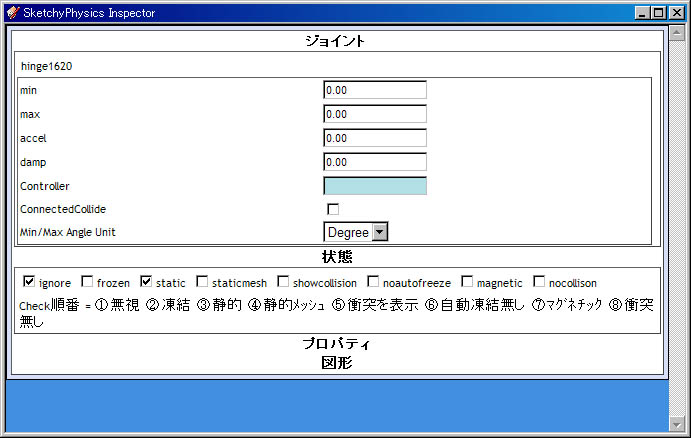
پuServoپv‚جƒWƒ‡ƒCƒ“ƒg‚ھژ×–‚‚بژ‚حپAƒŒƒCƒ„‚جپuSketchyPhysicsپv‚جƒ`ƒFƒbƒN‚ًٹO‚·‚ئ”ٌ•\ژ¦‚ة‚إ‚«‚éپB
پ¦ƒwƒ‹ƒv‚âژQچl‚ھ•K—v–³‚¢ڈêچ‡پAپuSP Wikiپv‚ًƒNƒٹƒbƒN‚µ‚ب‚‚ؤ‚à‘¼‚ج‹َ”’‚ًƒNƒٹƒbƒN‚µ‚ؤ‚àƒeƒLƒXƒgƒ{ƒbƒNƒX‚ح•\ژ¦‚³‚ê‚é
پuServoپv‚جƒWƒ‡ƒCƒ“ƒg‚ھژ×–‚‚بژ‚حپAƒŒƒCƒ„‚جپuSketchyPhysicsپv‚جƒ`ƒFƒbƒN‚ًٹO‚·‚ئ”ٌ•\ژ¦‚ة‚إ‚«‚éپB
 “Y•tƒtƒ@ƒCƒ‹
|