پuVisualSFMپvƒwƒ‹ƒv‚©‚çˆّ—p
ژ‹ٹo‰»
* [ƒپƒjƒ…پ[] -> [•\ژ¦] ‚جƒپƒjƒ…پ[چ€–ع‚ًژg—p‚µ‚ؤپA•\ژ¦ƒ‚پ[ƒh‚ً‘I‘ً‚·‚é‚©ƒpƒ‰ƒپپ[ƒ^‚ً•دچX‚µ‚ـ‚·پB
* ƒ}ƒEƒXپAƒLپ[ƒ{پ[ƒh ƒVƒ‡پ[ƒgƒJƒbƒgپA‚ـ‚½‚حƒcپ[ƒ‹ƒoپ[ ƒ{ƒ^ƒ“‚ًژg—p‚·‚é‚ئپA‚و‚èگv‘¬‚ةگط‚è‘ض‚¦‚邱‚ئ‚ھ‚إ‚«‚ـ‚·پB
* Œ»چف‚جƒrƒ…پ[‚ً JPEG ƒtƒ@ƒCƒ‹‚ئ‚µ‚ؤ•غ‘¶‚·‚邱‚ئ‚àپAƒپƒ‚ƒٹ‚ةƒRƒsپ[‚·‚邱‚ئ‚à‚إ‚«‚ـ‚· (ppt ‚ة“\‚è•t‚¯‚ـ‚·‚©?)
* ‚³‚ç‚ة‘½‚‚جƒhƒLƒ…ƒپƒ“ƒg‚ھ’ا‰ء‚³‚ê‚é—\’è‚إ‚·
ƒ}ƒEƒXƒRƒ“ƒgƒچپ[ƒ‹‚ئƒiƒrƒQپ[ƒVƒ‡ƒ“
* 3D ƒ|ƒCƒ“ƒg ƒ‚پ[ƒh‚إƒJƒپƒ‰‚ً‰Eƒ_ƒuƒ‹ƒNƒٹƒbƒN‚·‚é‚ئپA‘I‘ً‚µ‚½‰و‘œ‚ھ•\ژ¦‚³‚ê‚ـ‚·پB
* ƒTƒ€ƒlƒCƒ‹ ƒ‚پ[ƒh‚إ‰و‘œ‚ًچ¶ƒ_ƒuƒ‹ƒNƒٹƒbƒN‚·‚é‚ئپA‘I‘ً‚µ‚½‰و‘œ‚ھ•\ژ¦‚³‚ê‚ـ‚·پB
* ’Pˆê‰و‘œƒ‚پ[ƒh‚إ‰Eƒ_ƒuƒ‹ƒNƒٹƒbƒN‚·‚é‚ئپA‘O‚ج•\ژ¦ƒ‚پ[ƒh‚ة–ك‚è‚ـ‚·پB
* چ¶/‰EƒNƒٹƒbƒN+ƒzپ[ƒ‹ƒh+ˆع“®‚إƒpƒ“/‰ٌ“]‚µ‚ـ‚·پB
* Shift + ƒ}ƒEƒXپA‚ـ‚½‚حƒ}ƒEƒXƒzƒCپ[ƒ‹‚إƒYپ[ƒ€
* پuAlt + ƒ}ƒEƒXƒzƒCپ[ƒ‹پv‚إƒ|ƒCƒ“ƒgƒTƒCƒY‚ً•دچX
* Ctrl + ƒ}ƒEƒXƒzƒCپ[ƒ‹‚إ‘ٹ‘خ“I‚بƒJƒپƒ‰ƒTƒCƒY‚ً•دچX
* چ¶/‰E‚جƒ_ƒuƒ‹/ƒVƒ“ƒOƒ‹ƒNƒٹƒbƒN‚ًژژ‚µ‚ؤ‚ف‚ؤ‚‚¾‚³‚¢(‹َ‚«ƒXƒyپ[ƒX‚ـ‚½‚حƒJƒپƒ‰ڈمپA‰و‘œڈم)
ƒLپ[ƒ{پ[ƒhƒVƒ‡پ[ƒgƒJƒbƒg
2D ƒrƒ…پ[‚ةچ‡‚ي‚¹‚½پuZپvƒYپ[ƒ€پB3D ƒrƒ…پ[—p‚ةƒٹƒZƒbƒg‚µ‚ـ‚·پB
پuƒoƒbƒNƒXƒyپ[ƒXپv ƒTƒ€ƒlƒCƒ‹ ƒrƒ…پ[‚ة–ك‚è‚ـ‚·
پuƒ^ƒuپv –§ڈW 3D ƒ‚ƒfƒ‹‚ئ‘a 3D ƒ‚ƒfƒ‹‚ًگط‚è‘ض‚¦‚ـ‚· پu
ƒ^ƒuپv Œ³‚ج‰و‘œ‚ئکc‚ف‚ج‚ب‚¢ƒrƒ…پ[‚ًگط‚è‘ض‚¦‚ـ‚·
پuˆêژ’âژ~پv Œ»چف‚جƒJƒپƒ‰‚إ”Fژ¯‚³‚ê‚ؤ‚¢‚é“_‚ج‚ف‚ً•\ژ¦‚µ‚ـ‚·
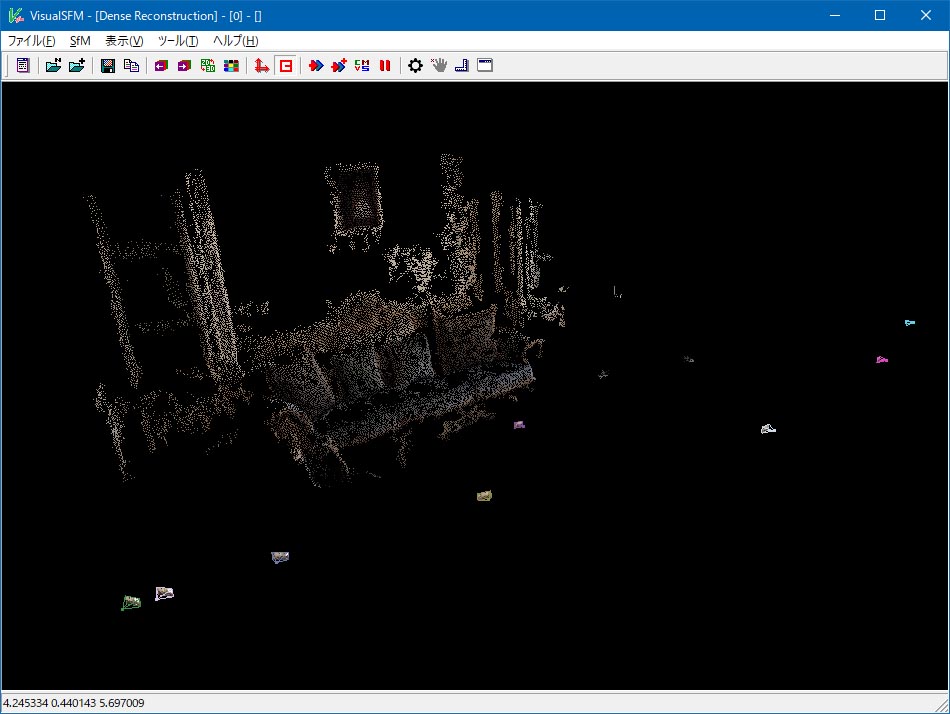
پuTپv 3D ژ‹ٹo‰»ƒ‚پ[ƒh‚ًگط‚è‘ض‚¦‚ـ‚·پB
VisualSFM‚إƒAƒjƒپپ[ƒVƒ‡ƒ“‚ًٹب’P‚ة•\ژ¦
F4 ‚ًƒNƒٹƒbƒN‚µ‚ؤپAŒ»چف‚جƒrƒ…پ[‚ًƒAƒjƒپپ[ƒVƒ‡ƒ“ ƒٹƒXƒg‚ة’ا‰ء‚µ‚ـ‚·پB‚¢‚‚آ‚©‚جƒrƒ…پ[ (ˆظ‚ب‚éƒrƒ…پ[ƒ|ƒCƒ“ƒg‚ـ‚½‚حˆظ‚ب‚éƒrƒ…پ[ ƒ‚پ[ƒh) ‚ً’ا‰ء‚µ‚½ŒمپAF5 ‚ً 1 ‰ٌƒNƒٹƒbƒN‚·‚é‚ئپA•غ‘¶‚³‚ꂽƒrƒ…پ[‚ج‘JˆعƒAƒjƒپپ[ƒVƒ‡ƒ“‚ھ•\ژ¦‚³‚ê‚ـ‚·پBF5 ‚ًƒ_ƒuƒ‹ƒNƒٹƒbƒN‚·‚é‚ئپAƒAƒjƒپپ[ƒVƒ‡ƒ“‚ھƒ‹پ[ƒvچؤگ¶‚³‚ê‚ـ‚·پB
“à•”ƒRƒ}ƒ“ƒhƒ‰ƒCƒ“‚ةپuamپv‚ئ“ü—ح‚·‚é‚ئپAƒAƒjƒپپ[ƒVƒ‡ƒ“‚ًچىگ¬‚·‚邽‚ك‚جƒRƒ}ƒ“ƒh‚جٹ®‘S‚بƒٹƒXƒg‚ھ•\ژ¦‚³‚ê‚ـ‚·پB


 “Y•tƒtƒ@ƒCƒ‹
“Y•tƒtƒ@ƒCƒ‹