|
2‚©‚ç‚ج‘±‚«پB
ƒpپ[ƒc•s‘«‚ج‚½‚كپA‚ب‚©‚ب‚©ٹ®گ¬‚ـ‚إ‘†‚¬’…‚¯‚ب‚¢پB
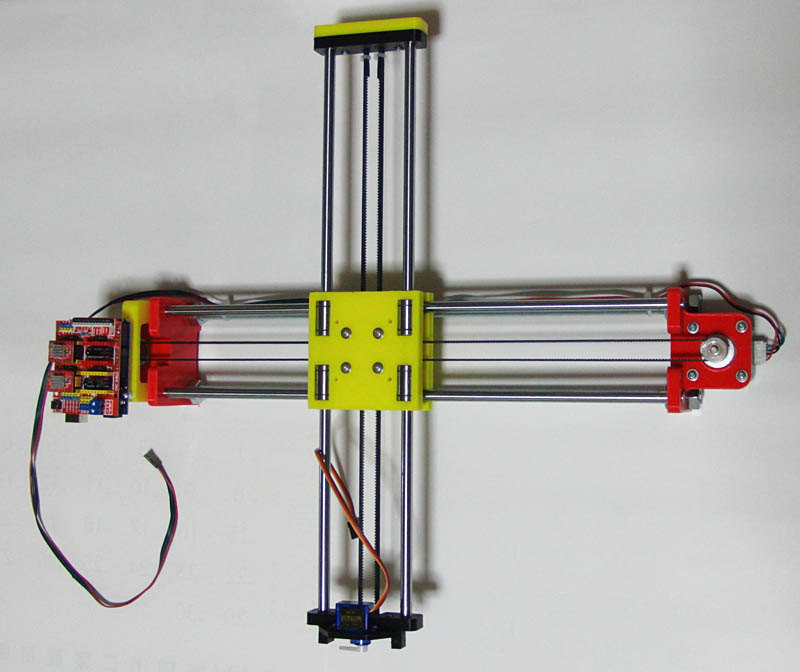
پuEggBotپv‚جƒ‚پ[ƒ^پ[‚ًژو‚èٹO‚µپAگو‚ة‚±‚؟‚ç‚ج‘g‚ف—§‚ؤ‚ً—Dگو‚·‚邱‚ئ‚ة‚µ‚½پB
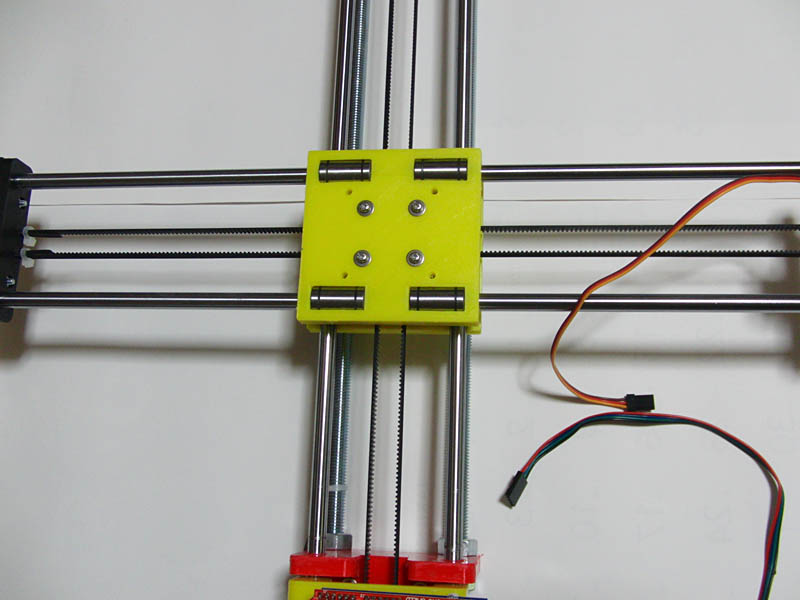
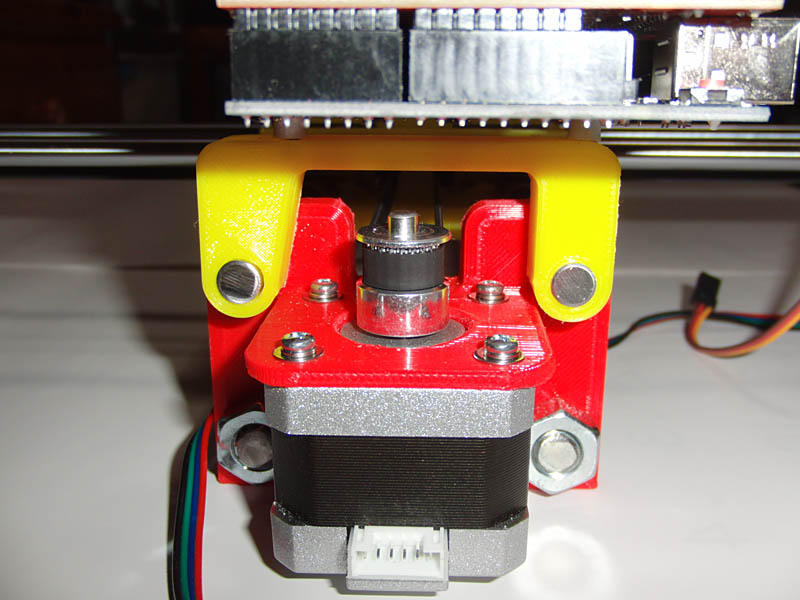
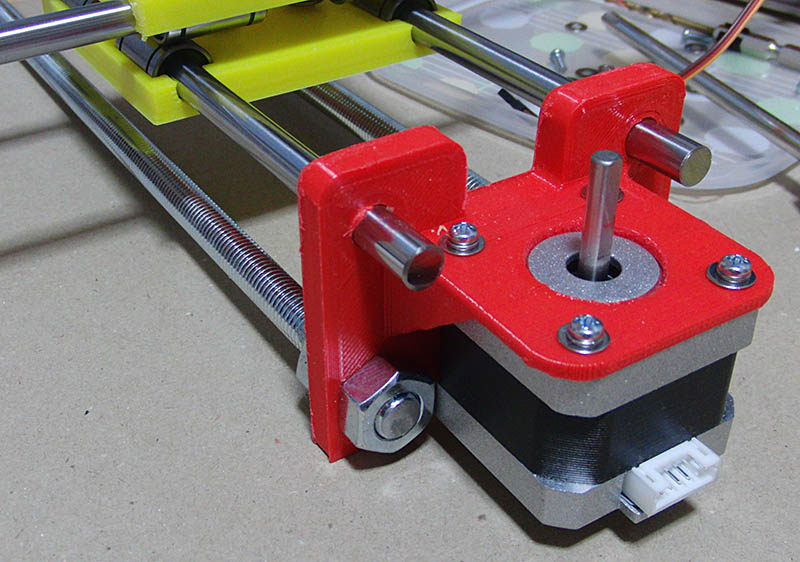
ٹî”آ‘¤‚جƒ‚پ[ƒ^پ[ژو‚è•t‚¯
ƒxƒ‹ƒg’ت‚µ
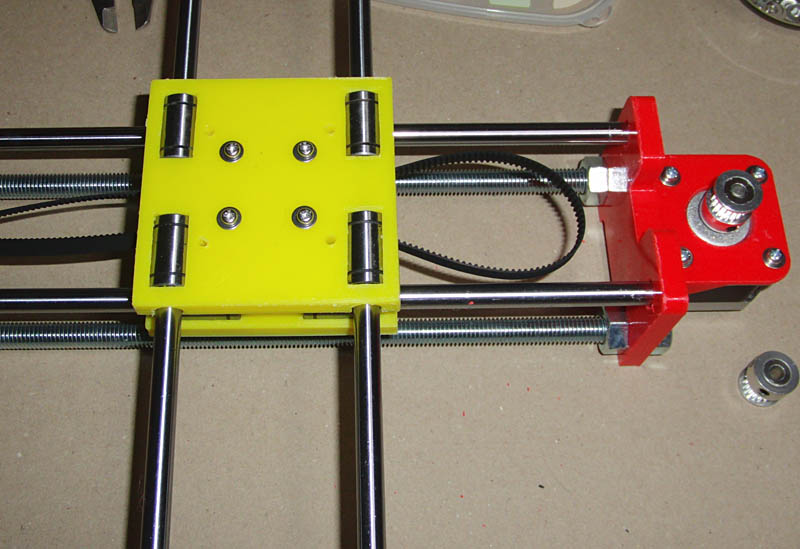
ƒLƒƒƒٹƒbƒW‚ة’ت‚·ƒxƒ‹ƒg‚جŒ„ٹش‚ھڈ‚ب‚پAƒhƒ‰ƒCƒoپ[‚ً—ک—p‚·‚é‚ئٹyپB
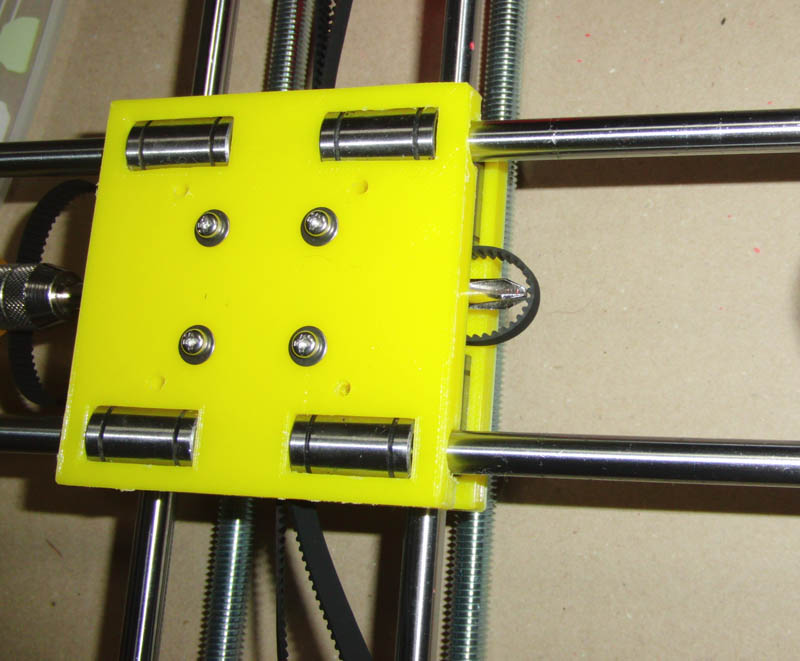
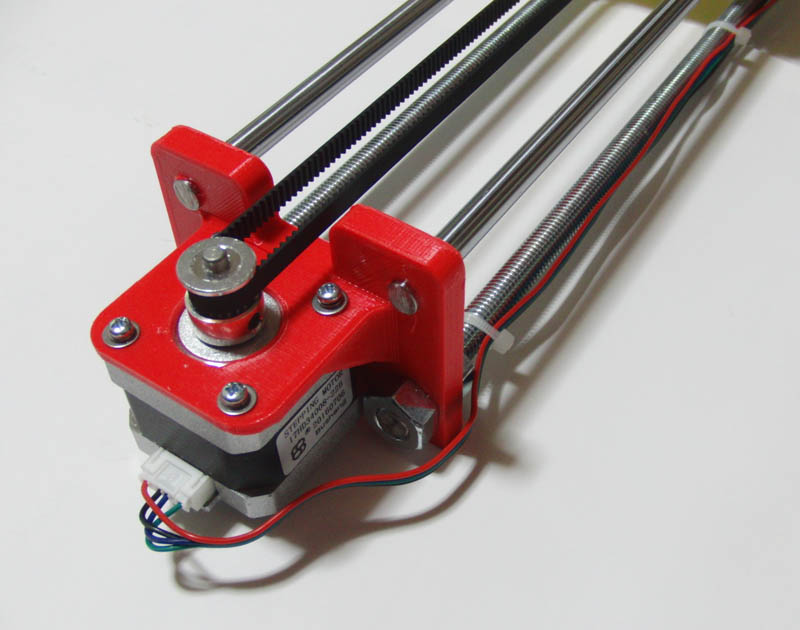
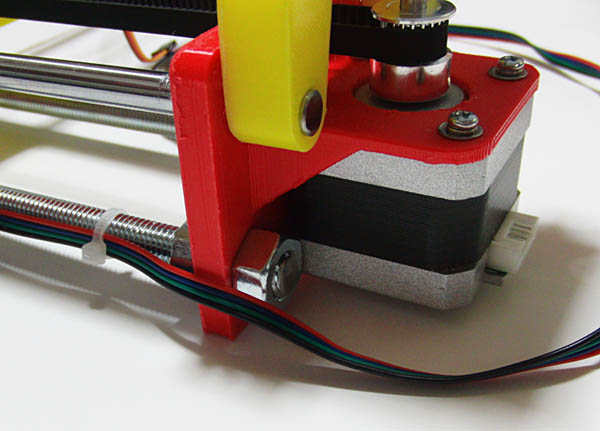
ƒxƒ‹ƒg‚جƒGƒ“ƒhڈˆ—
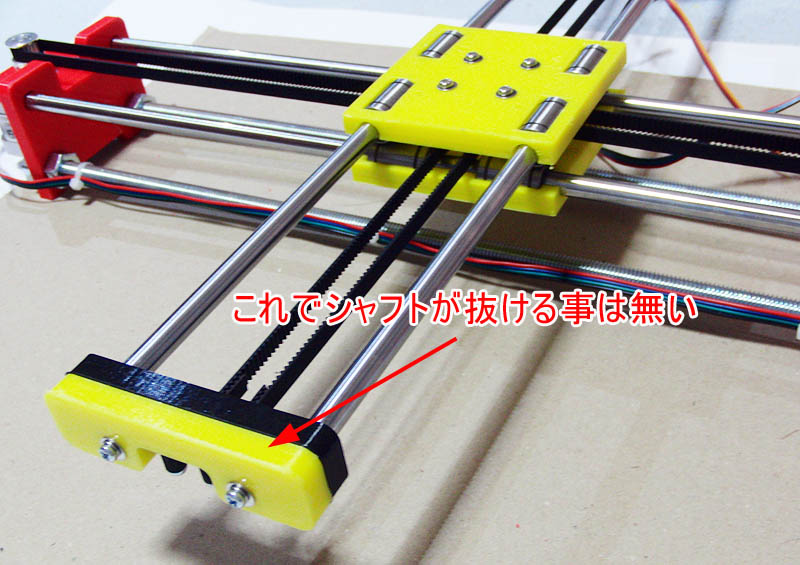
ƒ^ƒCƒg‚ة’£‚é‚ئپAƒVƒƒƒtƒg‚ًˆّ‚«ٹٌ‚¹پA”²‚¯ڈo‚é‰آ”\گ«‚ھ‚ ‚é‚ج‚إپA‰½‚ç‚©‚ج‘خچô‚ھ•K—vپB
ƒxƒ‹ƒg‚ج––’[ڈˆ—‚ح‚Rƒ~ƒٹ‚ج“çƒlƒW‚ً—ک—p‚µ‚½پB

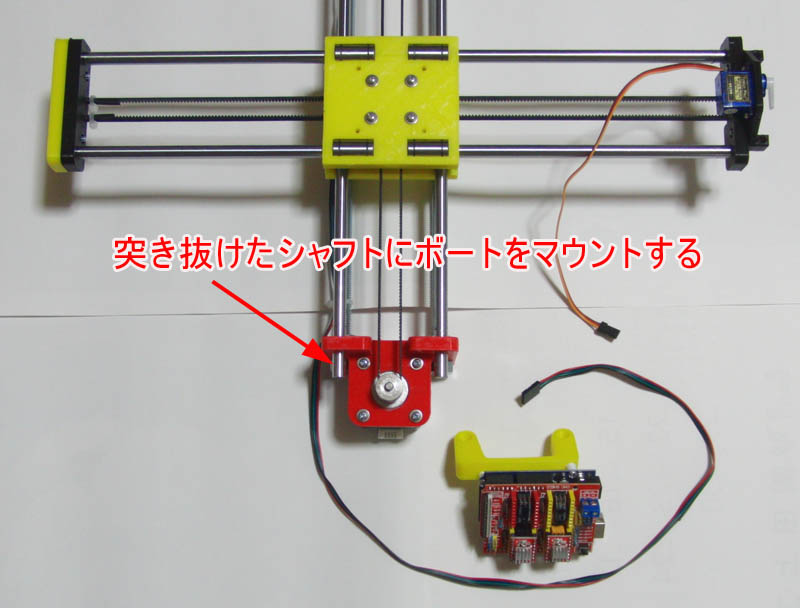
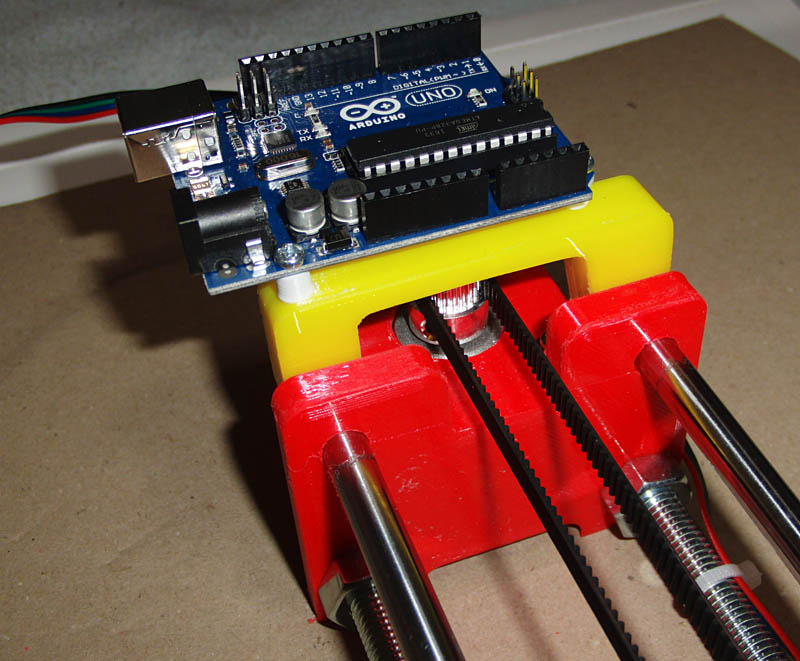
‹}ç¯پASketchUp‚إ”²‚¯–hژ~‚جƒGƒ“ƒh‚ًچىگ¬پB
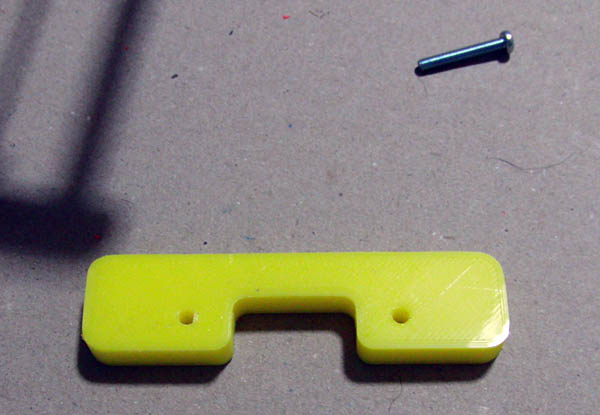
‚±‚ê‚إ“ث‚«”²‚¯‚éژ–‚ح–³‚¢پB
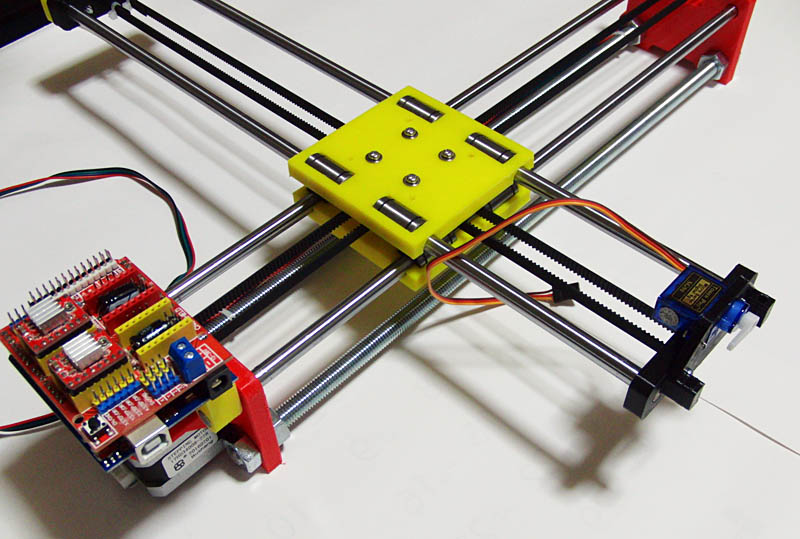
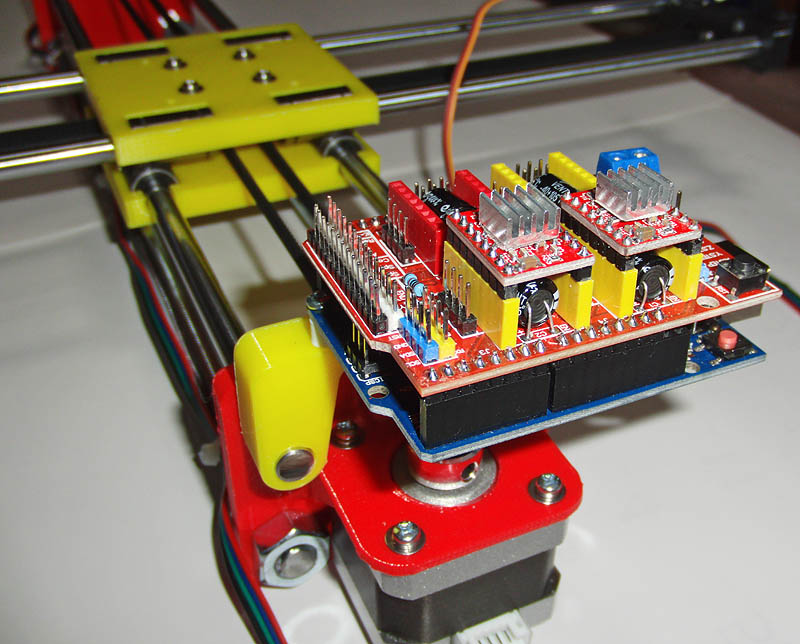
ƒ{پ[ƒh‚ًƒ}ƒEƒ“ƒgپB
چ،‰ٌ‚حپuSHIELDپv‚ً•t‚¯‚éژ–‚ھڈo—ˆ‚½پB
|