ژg‚¢ژn‚ك‚ؤپuAxiDrawپv‚إ‰ü‘P‚·‚ׂ«–â‘è‚ھ‚¢‚‚آ‚©ڈo‚ؤ‚«‚½پB
پy–â‘è1پz
‚»‚±‚»‚±‚جڈd—ت‚ھ‚ ‚èپAڈd—ت‚ن‚¦‚جˆہ’èٹ´‚à‚ ‚é‚ھپA•½’R‚بڈêڈٹ‚إژg—p‚µ‚ب‚¢‚ئˆê‹C‚ةƒoƒ‰ƒ“ƒX‚ھ•ِ‚ê‚ؤ‚µ‚ـ‚¤پB
گL‚ر‚½ƒyƒ“ƒzƒ‹ƒ_پ[‚جگو’[‚ح‹ح‚©‚بٹ÷ڈم‚ج‚ن‚ھ‚ف‚à‘ه‚«‚‰e‹؟پB
Expander‚ئ“¯‚¶—‹ü‚¾‚ئژv‚ء‚ؤ—ا‚¢پB
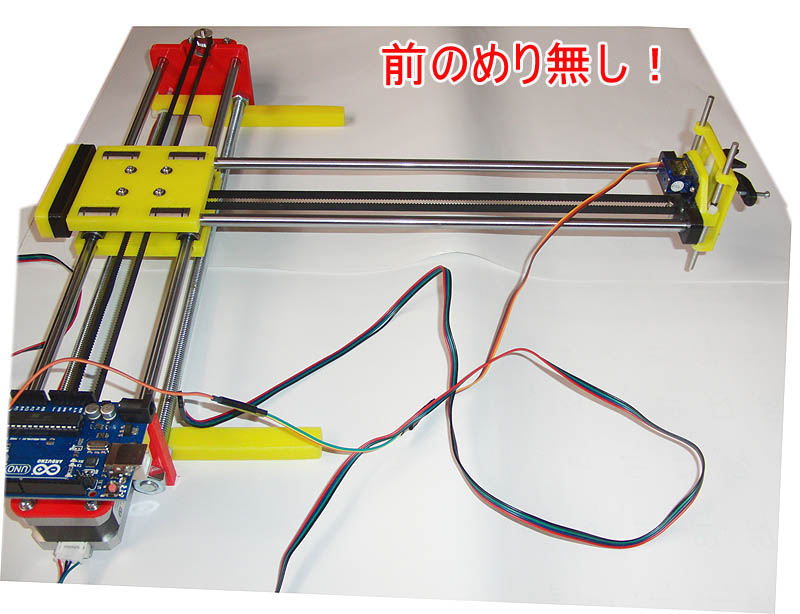
‘«‚جپA"“¥‚ٌ’£‚è•"6ƒZƒ“ƒ`‚ة‘خ‚µ‚ؤپA35ƒZƒ“ƒ`ˆبڈمƒAپ[ƒ€‚ھگL‚ر‚邽‚كپAگو’[‚ةˆع“®‚µ‚½ڈd—ت‚إپA–{‘ج‚ھ‘O‚ج‚ك‚è‚ة‚ب‚ء‚ؤ‚µ‚ـ‚¢پA–{‘ج‚ً‚µ‚ء‚©‚è—}‚¦‚ؤ‚¨‚©‚ب‚¢‚ئپAƒAپ[ƒ€‚جŒم‚ë‚ئ‘O‚إ‚Qƒ~ƒٹ‹ك‚‚جچ·‚ھ‚إ‚ؤ‚µ‚ـ‚¤پB
‘O‚ةپAƒyƒ“‚ھژ†‚ةگG‚ê‚ب‚¢“®‰و‚ًƒAƒbƒv‚µ‚½‚ھپA‚ـ‚³‚ة‚»‚ê‚ھŒ´ˆِ‚إ‚ ‚ء‚½پB
گL‚ر‚½گو’[پiŒ´“_پj‚إپAŒ„ٹشٹشٹu‚ً’²گ®‚·‚éڈêچ‡پA–{‘ج‚ً‚µ‚ء‚©‚è—}‚¦‚½ڈَ‘ش‚إ‚â‚ء‚½•û‚ھ—ا‚¢پB
ˆہ’èگ«‚ً•غ‚آ‚½‚كپA‰½‚ç‚©‚جƒpپ[ƒc‚ًچى‚éژ–‚ة‚ب‚è‚»‚¤‚¾پB
پy–â‘è2پz
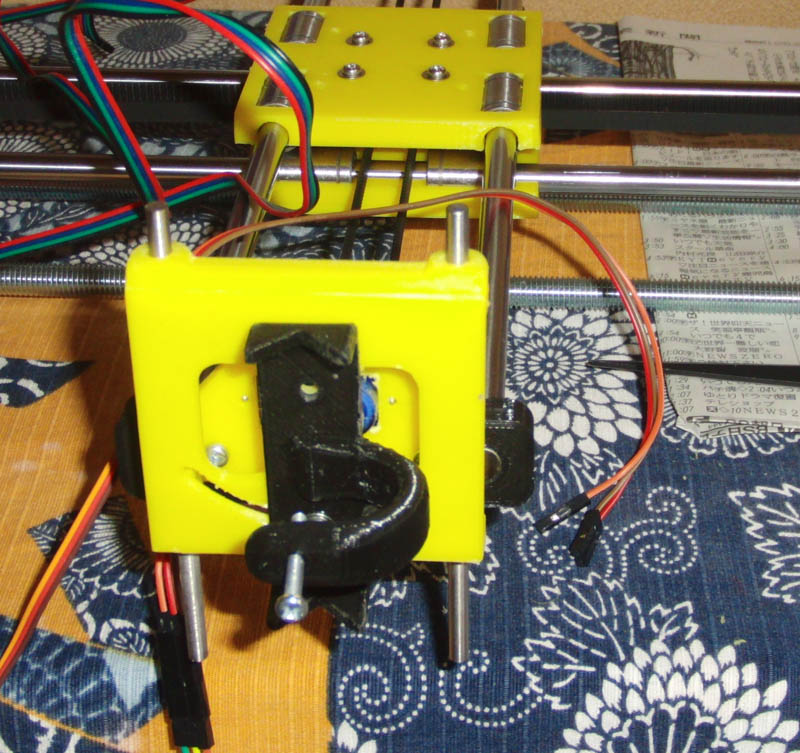
ƒwƒbƒh‚ـ‚ي‚è‚جپAƒpپ[ƒc‚جگ¸“xپB
ژہ‚ح‚±‚ê‚ھˆê”ش–ï‰îپI
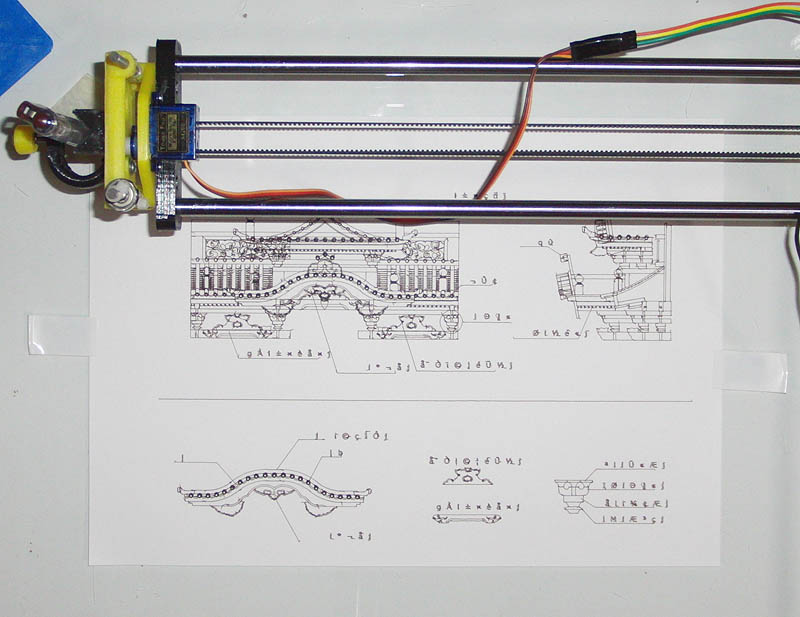
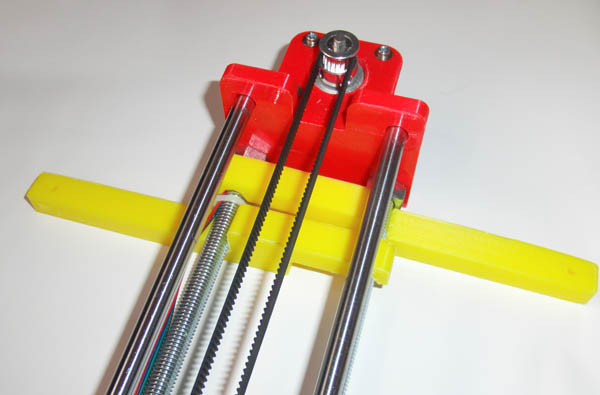
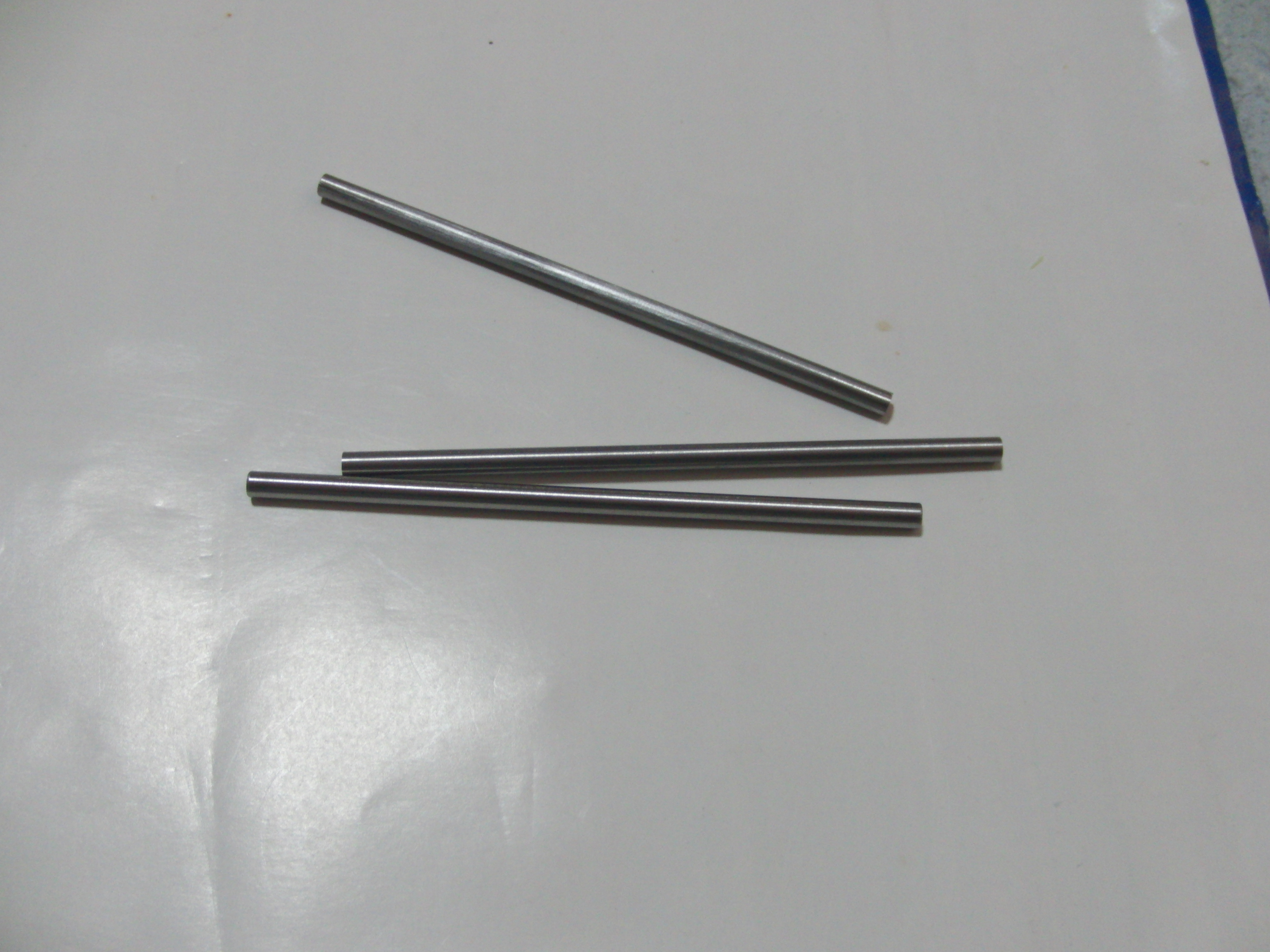
ژو‚èٹٌ‚¹‚½پA’¼Œa4ƒ~ƒٹپA’·‚³100ƒ~ƒٹ‚جƒyƒ“ƒLƒƒƒٹƒbƒW—p‚جƒXƒeƒ“ƒŒƒXƒoپ[‚جگ¸“x‚ھ‚ ‚ـ‚è‚ةچ“‚پA•\–ت‚جŒُ‘ٍ‚ح–³‚‚ظ‚عƒ„ƒXƒٹڈَ‘شپB
‚¨‚ـ‚¯‚ةگو’[‚©‚ç––’[‚ـ‚إ‚ھ•s‹دˆê‚ب‚½‚كپAٹٹ‚ç‚©‚ة’ت‚ء‚ؤ‚ح‚‚ê‚ب‚¢پB
ˆê–{‚¾‚¯‚ًژ،‹ï‚ةپAƒLƒƒƒٹƒbƒW‚جچ·‚µچ‚فŒٹ‚ً’²گ®‚·‚é‚ئٹ®‘S‚ةژ¸”s‚·‚éپB
‚·‚±‚µƒLƒcƒپ‚ج’²گ®‚إ‚àپA‚à‚¤•ذ•û‚حƒXƒgƒ“‚ئ—ژ‚؟‚ؤ‚µ‚ـ‚¤‚ظ‚ا‚جŒëچ·‚ةپA‚±‚؟‚ç‚جٹل‹…‚ـ‚إ—ژ‚؟‚ؤ‚µ‚ـ‚¤پB
پyژQچl‰و‘œپz
‰½‚â‚©‚â‚إپAƒwƒbƒh‚ًچى‚è‘ض‚¦‚éژ–‚R‰ٌپB
چ•پ@پ¨پ@”’‚ً‚QŒآپ@پ¨پ@Œ»چف‰©گF
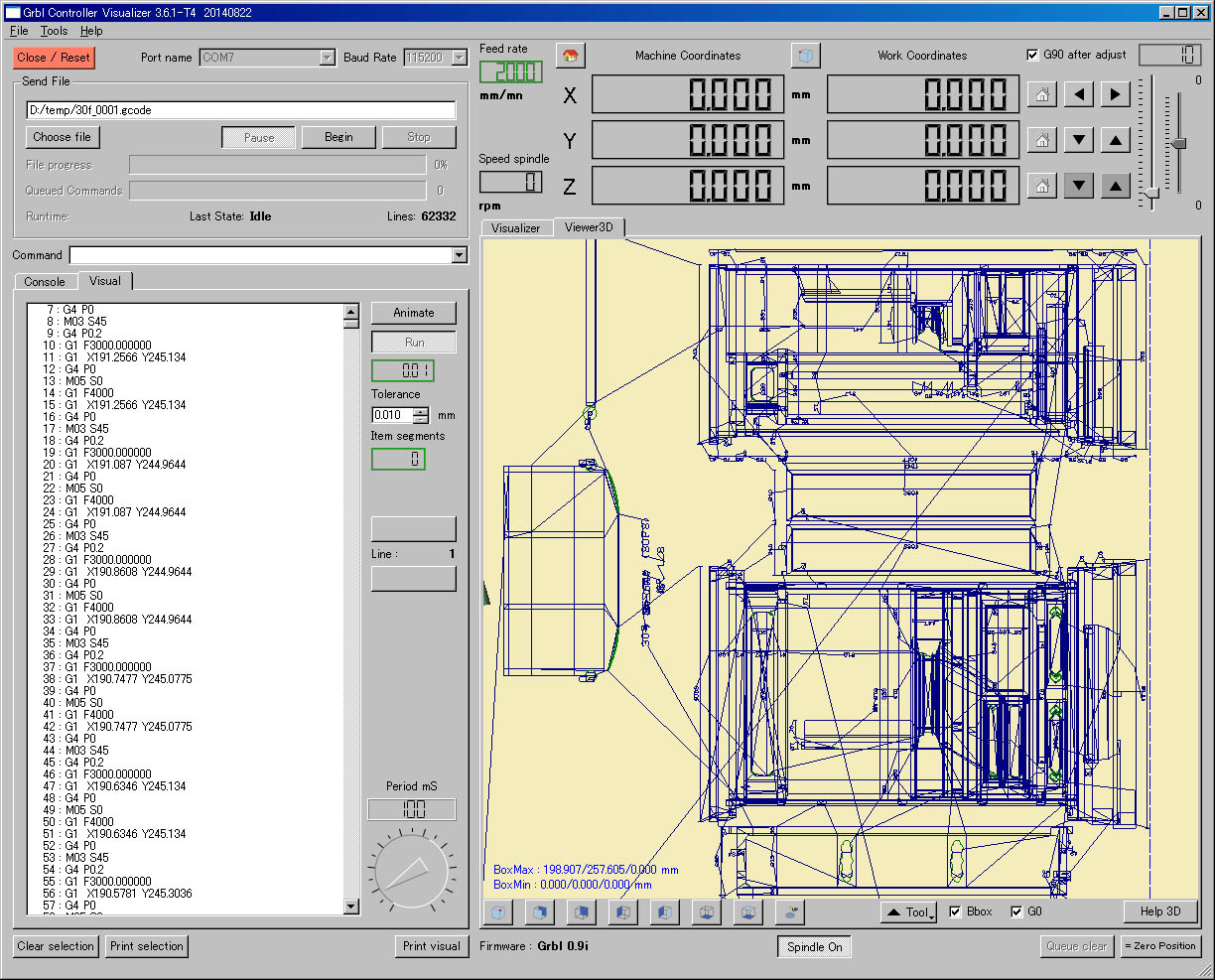
Œ»چفژg—p‚µ‚ؤ‚¢‚éƒLƒƒƒٹƒbƒW‚حپAپuSketchUpپv‚إڈCگ³‚µ‚½‚à‚جپB
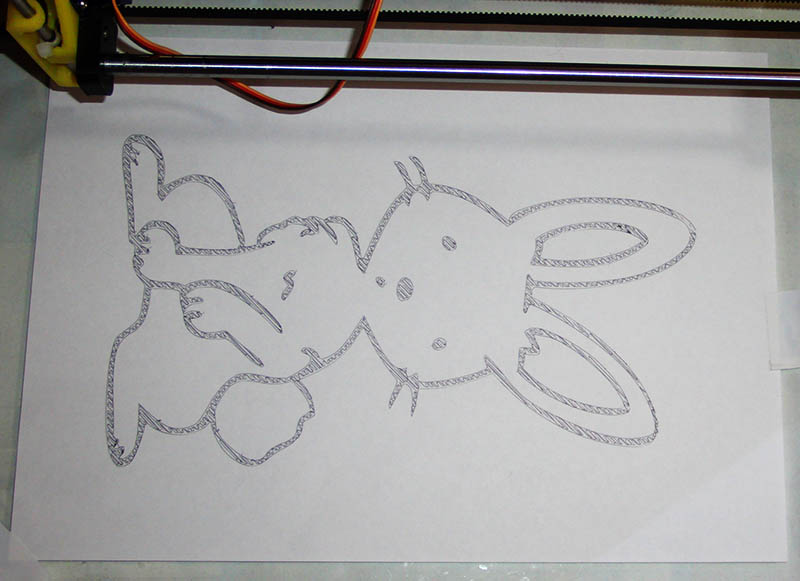
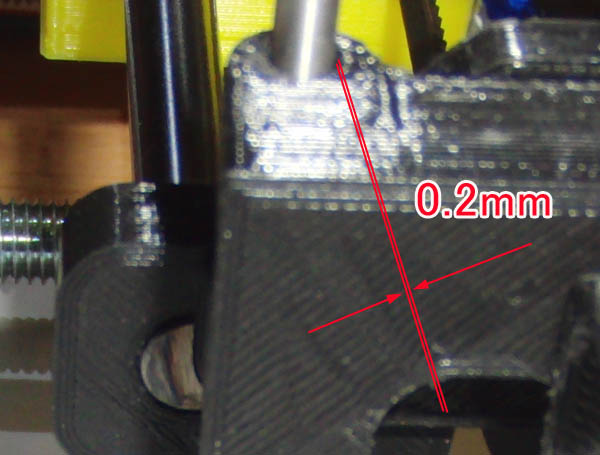
چإڈ‰‚ةگ»چى‚µ‚½ƒwƒbƒh‚حپA0.2ƒ~ƒٹ’ِ“x‚جŒ„ٹش‚ًگف‚¯پAƒXƒ‹ƒXƒ‹“®‚¢‚½پB
Œم‚ةپA‹ة’[‚ةچׂ©‚¢‰~پi0.5ƒسپj’ِ“x‚ج‰~‚ً•`‰و‚µ‚½ڈêچ‡پA–¾‚ç‚©‚ةŒëچ·‚ھ”گ¶پB
‚ا‚ê‚ظ‚اژٹش‚ً‚©‚¯‚ؤ‚àپAŒ„ٹش‚ًگف‚¯‚ب‚¢‰ءچH‚ھگâ‘خ‚ة•K—v‚ة‚ب‚éپB
Œ»چفپA’ا‰ء‚ج–â‘è‚ھ”گ¶‚µپA–é‚ئ’©‚ج‹C‰·چ·‚إپA•½–ت“x‚ھ•د‰»‚·‚éژ–پB
پi‚¨‚»‚ç‚‹C‰·چ·‚ة‚و‚éPLA‚ج–c’£پHپj
گ¸“x‚ج–â‘èپA‚¢‚آ‚ـ‚إ‘±‚‚ج‚â‚çپEپEپEپB
ƒ}ƒWƒbƒN‚©‚çپAƒ{پ[ƒ‹ƒyƒ“‚ـ‚إپB
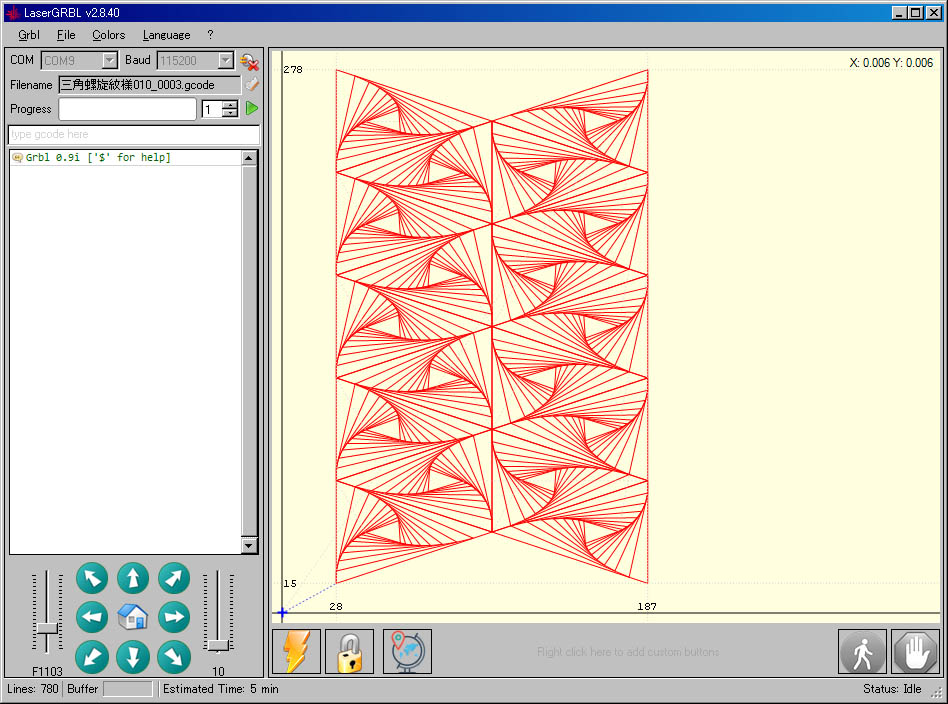
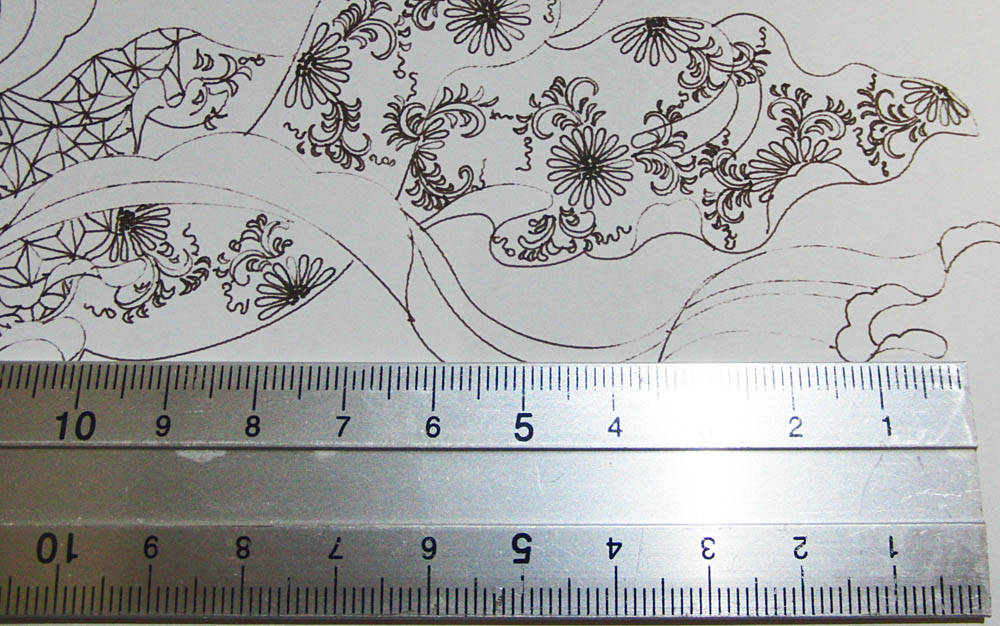
ƒyƒ“‚جƒeƒXƒg‚ًŒ“‚ث‚½ƒvƒچƒbƒgپB
ƒچپ[ƒ‰ƒ“ƒh‚جA3ƒTƒCƒY‚جƒJƒ‰پ[پEƒyƒ“ƒvƒچƒbƒ^پ[پiƒyƒ“Œًٹ·ژ®پj‚إ‚àپAگ¸“x‚ة‘خ‚µ‚ؤ‚±‚ê‚ظ‚ا‚جٹ´Œƒ‚ح–³‚©‚ء‚½پB
‰½‚و‚è‹ةچׂً•`‚¯‚éƒ{پ[ƒ‹ƒyƒ“‚âپA–œ”Nژ؟‚ھژg‚¦پAŒ´“_‚ًژ©چف‚ةگف’èڈo—ˆ‚éƒپƒٹƒbƒg‚ح‘ه‚«‚¢پB
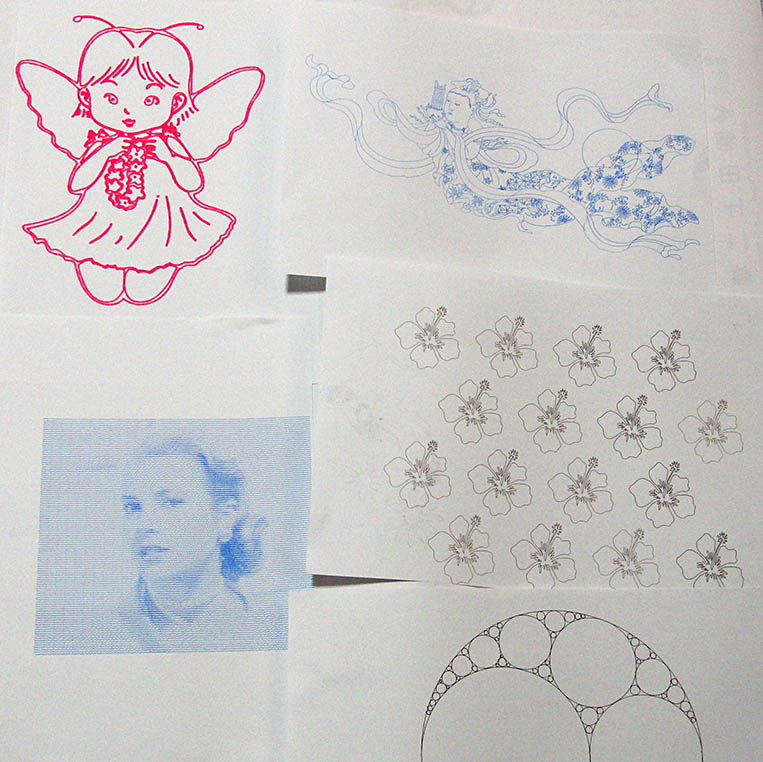
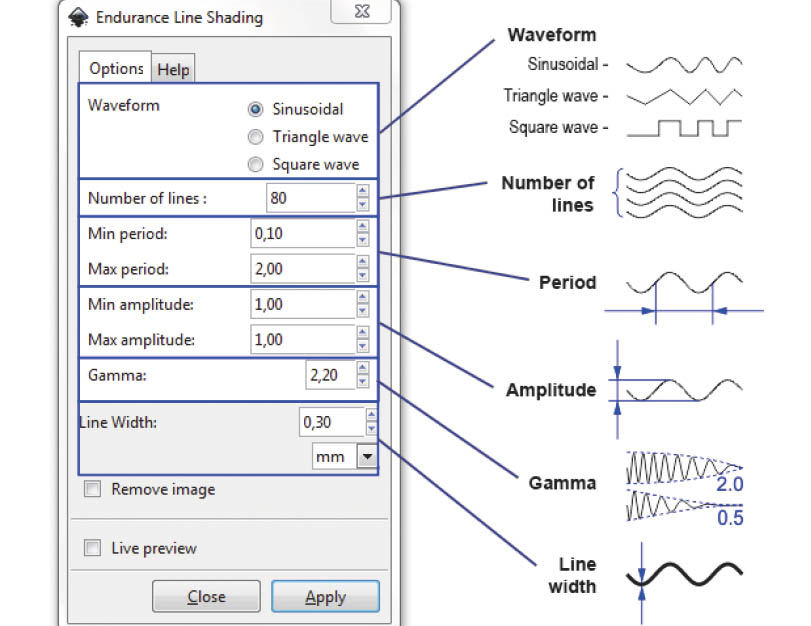
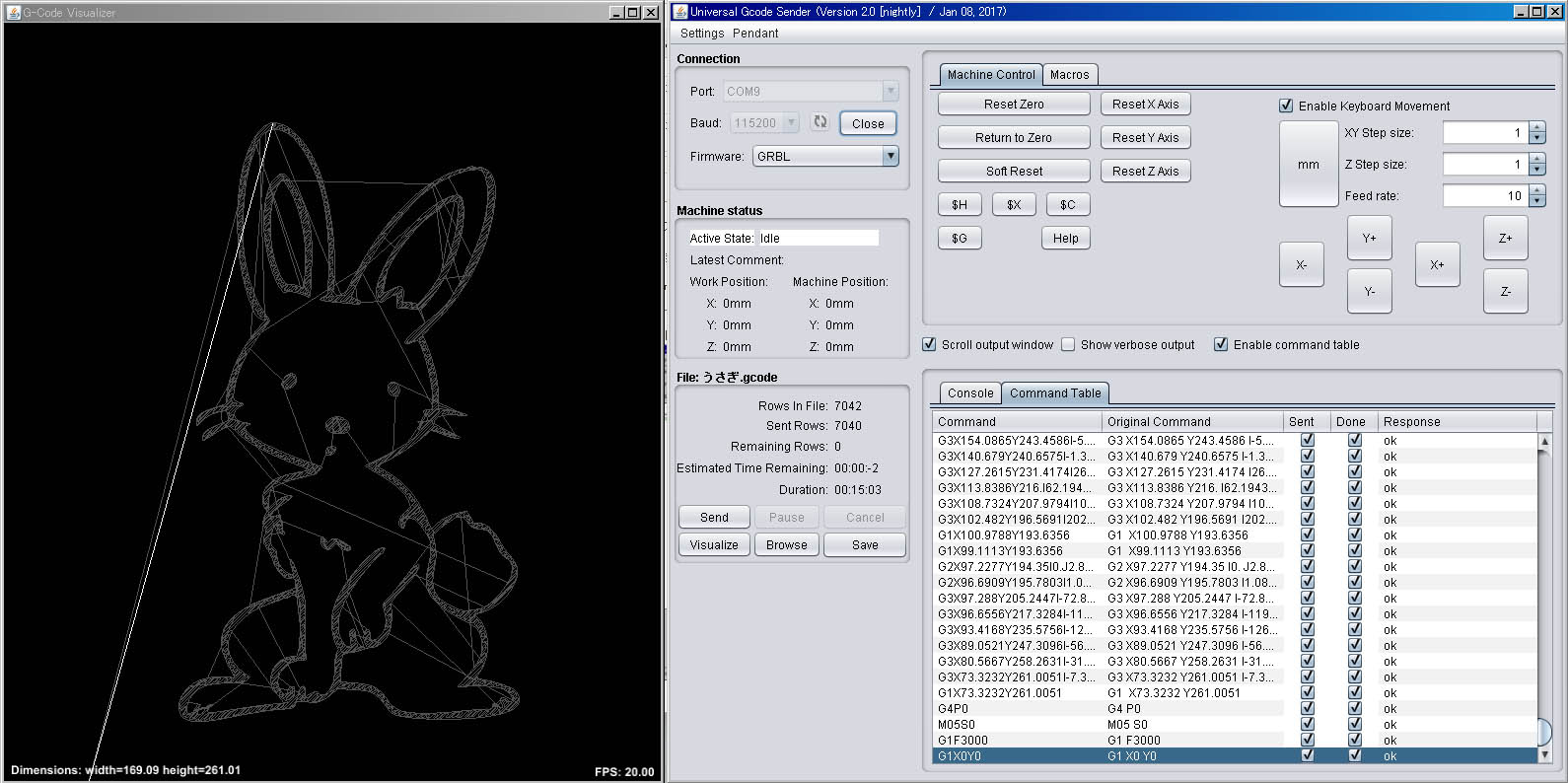
ƒOƒŒپ[ƒXپEƒPƒٹپ[‚حپAپuAxiDrawپv‚جƒeƒXƒg‰و‘œ‚©‚ç”qژطپB
پEپEپE‚¢‚آŒ©‚ؤ‚àمY—ي‚إ‚·‚ثپB


 “Y•tƒtƒ@ƒCƒ‹
“Y•tƒtƒ@ƒCƒ‹