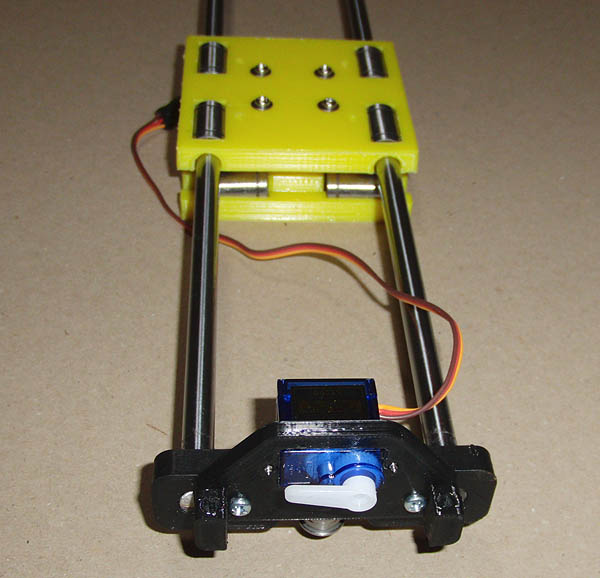
Œ‹‹اپAƒ\پ[ƒX‚ًŒ©‚آ‚¯‚éژ–‚ھ‚إ‚«‚¸‚ةپAژ©—ح‚إ‰ًŒˆپBپiچھگ«–³‚µپIپj
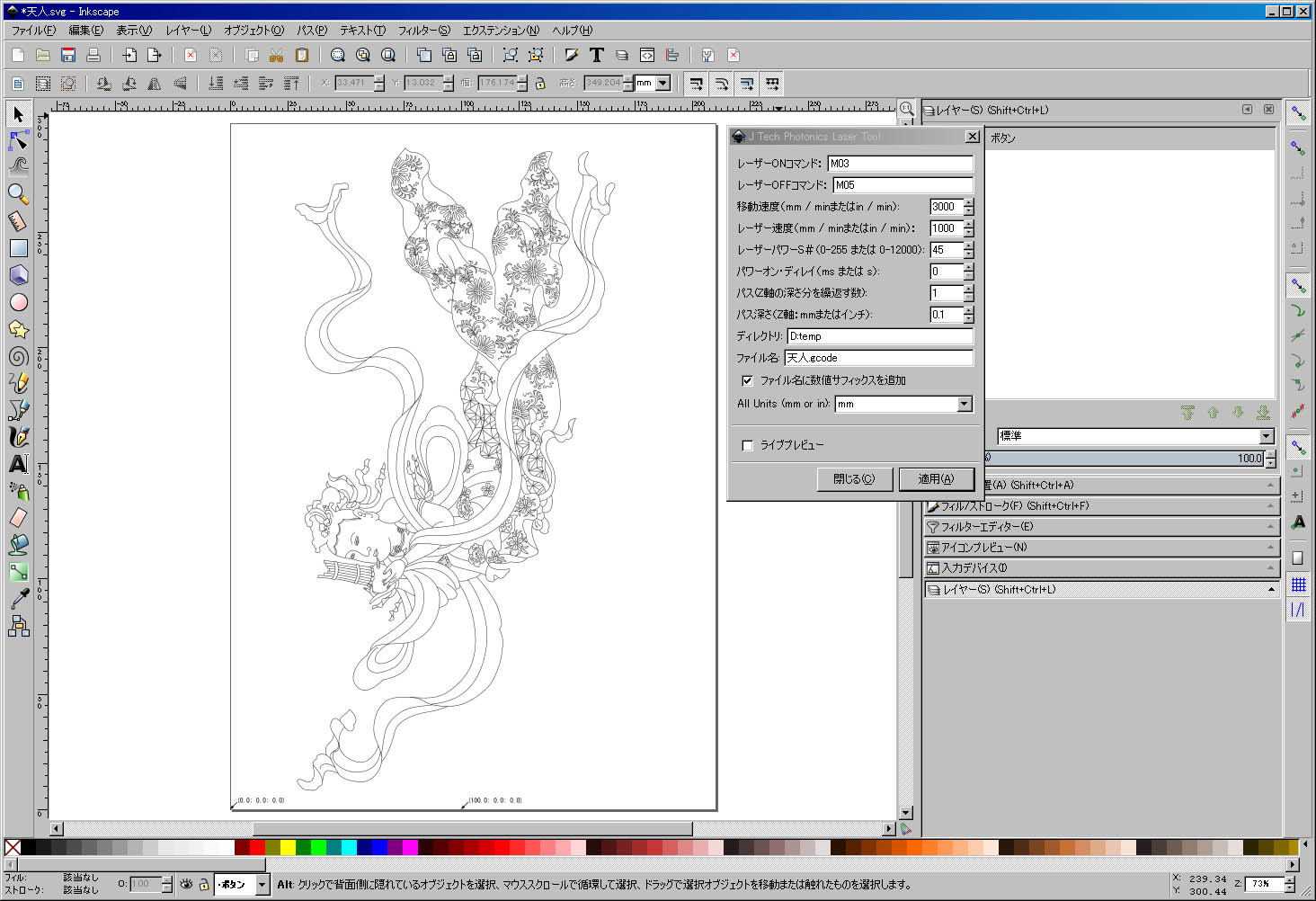
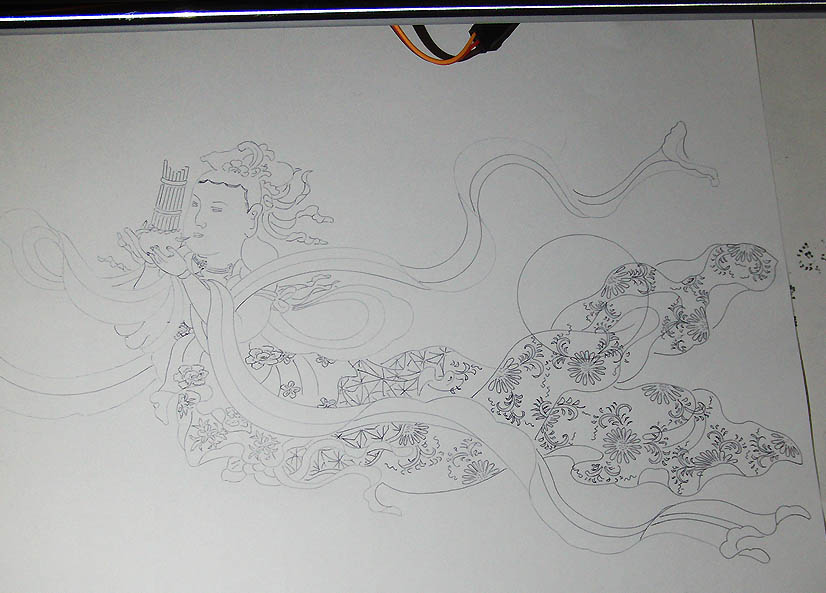
•`‰و‘خڈغ‚ح10”N‚ظ‚ا‘O‚ةژھٹG—p‚ئ‚µ‚ؤ•`‚¢‚½پu“Vگlپv‚ً‘I‘ًپB
ژٹش‚ً‚©‚¯‚ؤٹô“x‚àƒeƒXƒg‚µ‚½‚‚ب‚¢‚ج‚إپAچإڈ‰‚©‚çچ×پX‚µ‚½ٹG‚إژژ‚µ‚ؤ‚ف‚éژ–‚ةپB
چ،‰ٌپAƒeƒXƒg‚·‚éƒxƒNƒgƒ‹ƒfپ[ƒ^پB
10”N‚ظ‚ا‘O‚ةژھٹG—p‚ئ‚µ‚ؤپuIllustratorپv‚إ‹N‚±‚µ‚ؤپA‚»‚ج‚ـ‚ـ‚¾‚ء‚½پB
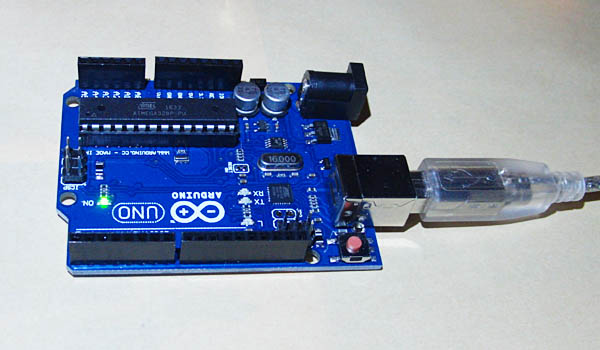
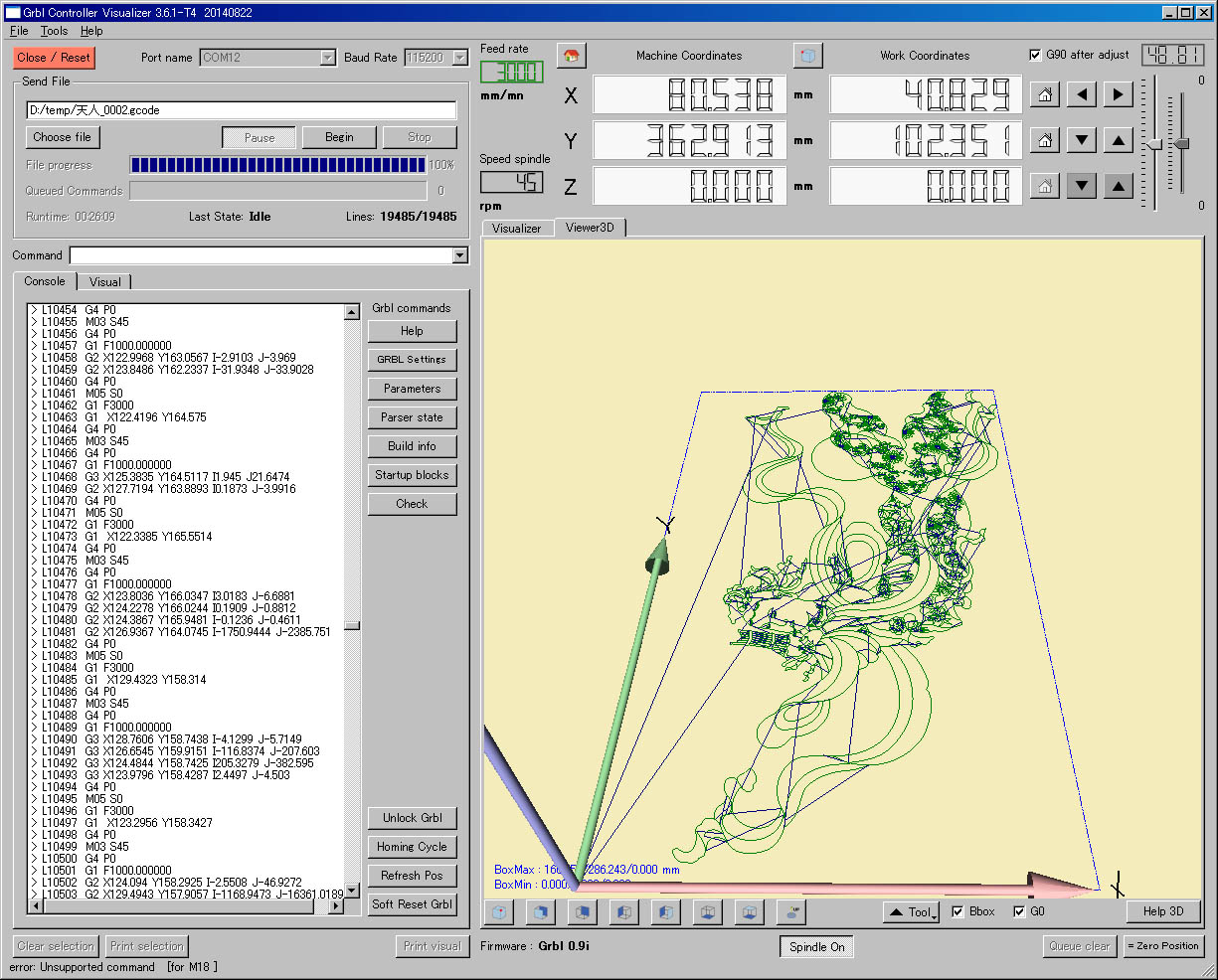
پuGrblControllerپv‚إ“ا‚فچ‚فپAپuBeginپvپI
ƒRƒ}ƒ“ƒhƒ‰ƒCƒ“‚©‚çپAپuUNOپv‚ض‚جڈ‘‚«چ‚ف•دچX‚ح‚Uƒ–ڈٹپB
پ¦گف’è‚حژں‰ٌ•دچX‚ـ‚إ•غژ‚³‚ê‚邽‚كپAڈ‰‰ٌ‚¾‚¯پB
$100=80.000 (x, step/mm)
$101=80.000 (y, step/mm)
$110=3000.000 (x max rate, mm/min)
$111=3000.000 (y max rate, mm/min)
$120=300.000 (x accel, mm/sec^2)
$121=300.000 (y accel, mm/sec^2)
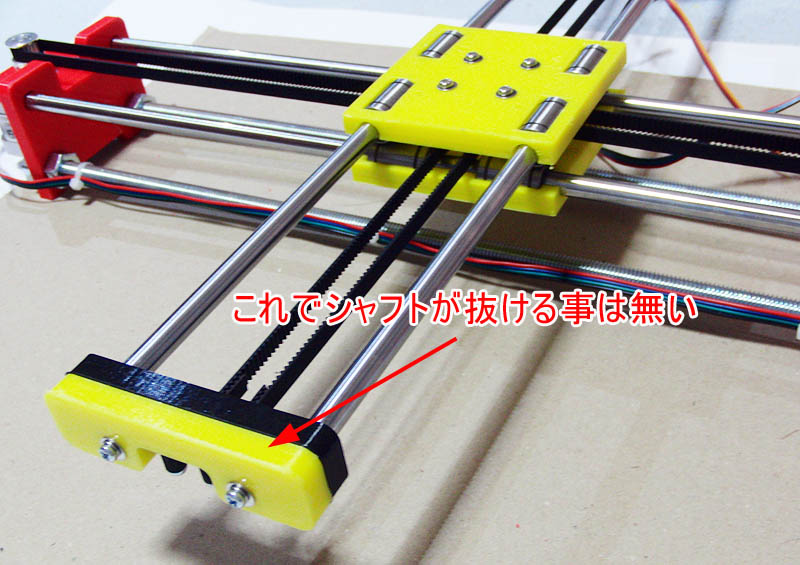
ژ†‚ًˆّ‚«‚¸‚è‰ٌ‚µپA‘fگlٹغڈo‚µ‚جƒvƒچƒbƒgپiٹ¾پGپj
ƒyƒ“’²گ®‚إ‚ح—\‘ھ‚ًٹO‚µ‚ؤ‚µ‚ـ‚ء‚½‚ھپA•`‰و‚ة‚آ‚¢‚ؤ‚حژvکf’ت‚èگU‚é•‘‚ء‚ؤ‚‚ꂽپB
ڈ‰ƒeƒXƒg‚إڈ‘‚«ڈم‚ھ‚ء‚½‚à‚ج‚ھ‚±‚؟‚çپB
ژ†‚ئƒ{پ[ƒ‹ƒyƒ“‚ج‘ٹگ«‚ھˆ«‚پAژں‘و‚ة”–‚‚ب‚ء‚ؤ‚¢‚ء‚½پB
پi“Vگl‚جٹç‚جˆê•”‚حƒCƒ“ƒN‚ھ‚ج‚ء‚ؤ‚¢‚ب‚¢پBپj
‚±‚جŒم100پ~100‚جƒ{ƒbƒNƒX‚ً•`‰و‚µگ¸“x‚ًƒ`ƒFƒbƒNپB
‘S‚‚جŒëچ·–³‚µ‚إپAپuAxiDrawپv‚ح‚±‚ê‚إٹ®گ¬پIپB
•ھ‰ً”\‚ح0.1ƒ~ƒٹ’ِ“xپB
پuEggBotپv‚ئ”نٹr‚·‚é‚ئ’f‘Rگ¸“x‚ھچ‚‚¢پB
پ¦“Y•tƒtƒ@ƒCƒ‹‚حپ@704پ~400پ@ƒTƒCƒY‚جmp4پ@“®‰و

“Y•tƒtƒ@ƒCƒ‹