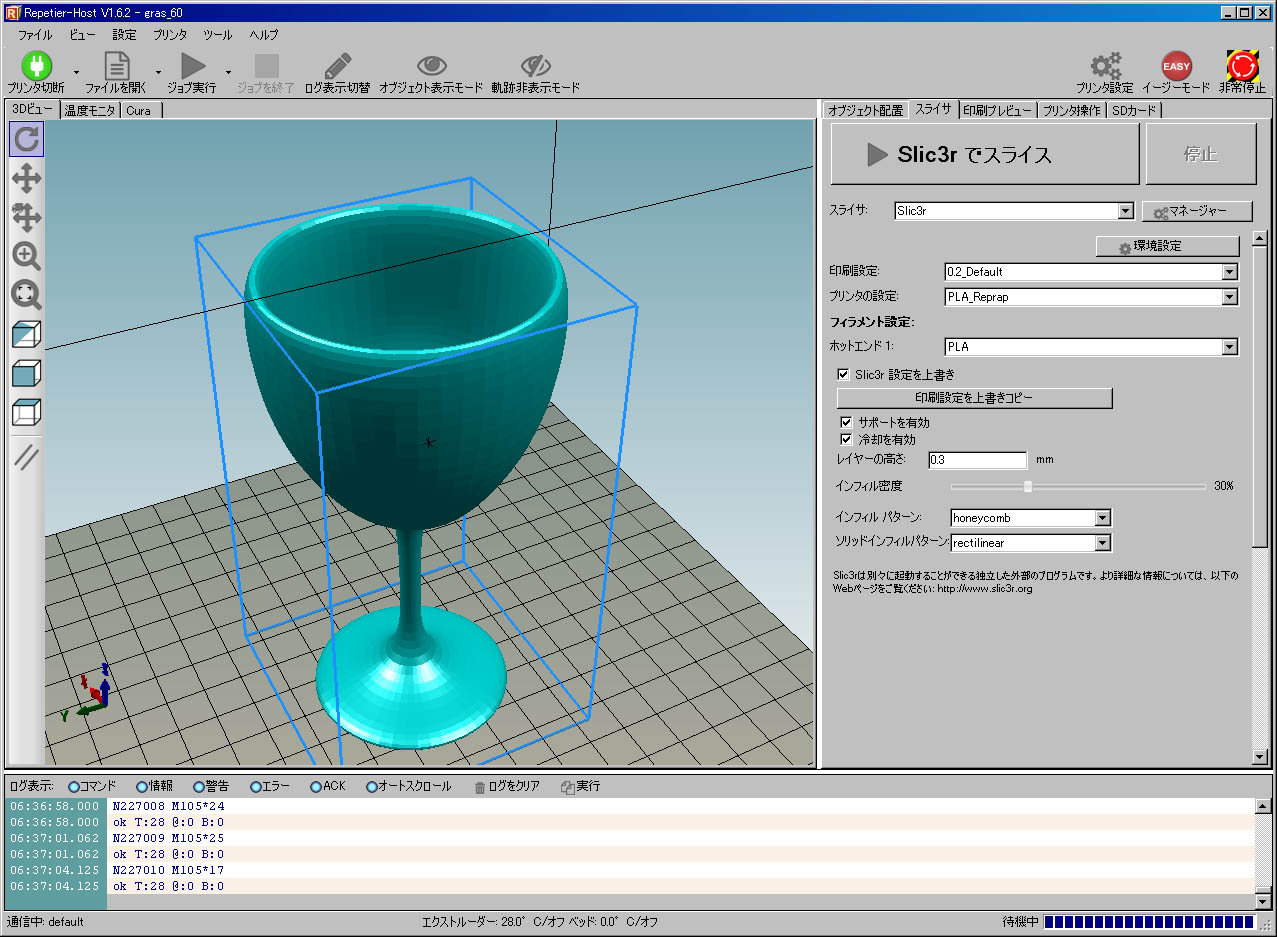
ˆêŒ©پA“®‚«‚جٹy‚µ‚¢3Dƒvƒٹƒ“ƒ^پ[‚¾‚ھپAX,Y,Z‚جژ²‚ة“Y‚ء‚ؤژ†‚جŒْ‚³‚ظ‚ا‚ًگد‘w‚µ‚ؤ‚¢‚‰ك’ِ‚ح“’êژ‘م’x‚ê‚ةٹ´‚¶‚ؤ‚µ‚ـ‚¤پB
ژٹش‚ھ‚©‚©‚邾‚¯‚إ‚ب‚پAƒIپ[ƒoپ[ƒnƒ“ƒO‚âپAƒuƒٹƒbƒWپAƒTƒ|پ[ƒg‚ب‚ا‚جƒvƒٹƒ“ƒg‚ة“Z‚ي‚é—]Œv‚ب‹Zڈp‚à‹ىژg‚µ‚ب‚¯‚ê‚خ‚¤‚ـ‚‘¢Œ`ڈo—ˆ‚ب‚¢پB
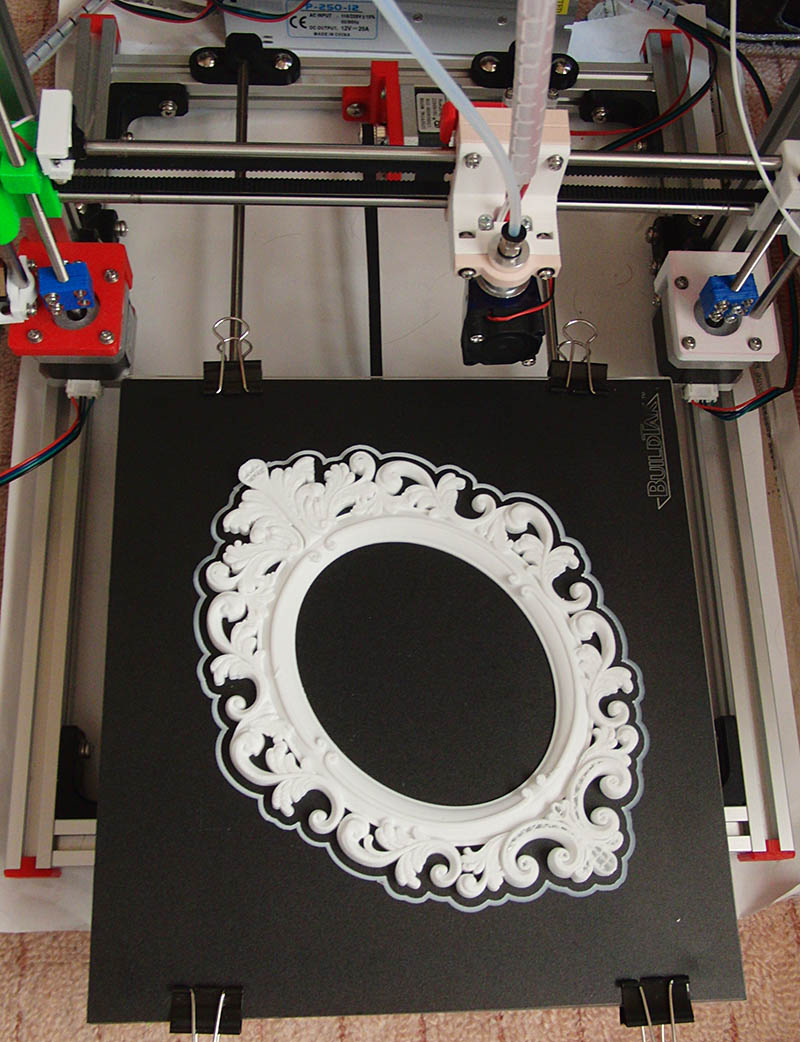
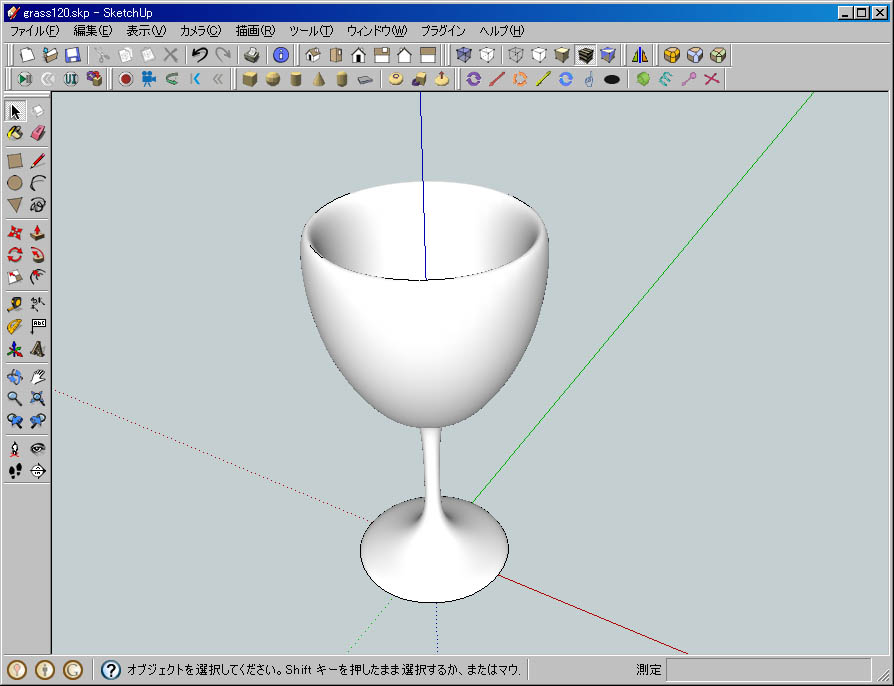
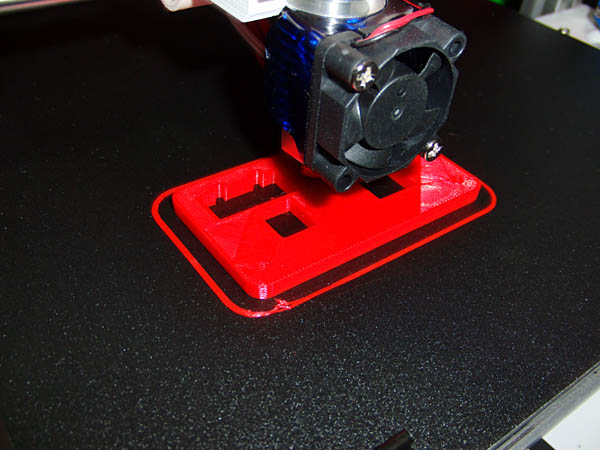
ٹ^‚جٹç‚ً’ׂµ‚½‚و‚¤‚بŒ`ڈَ‚ج—â‹p—pƒtƒ@ƒ“ƒ_ƒNƒgپB
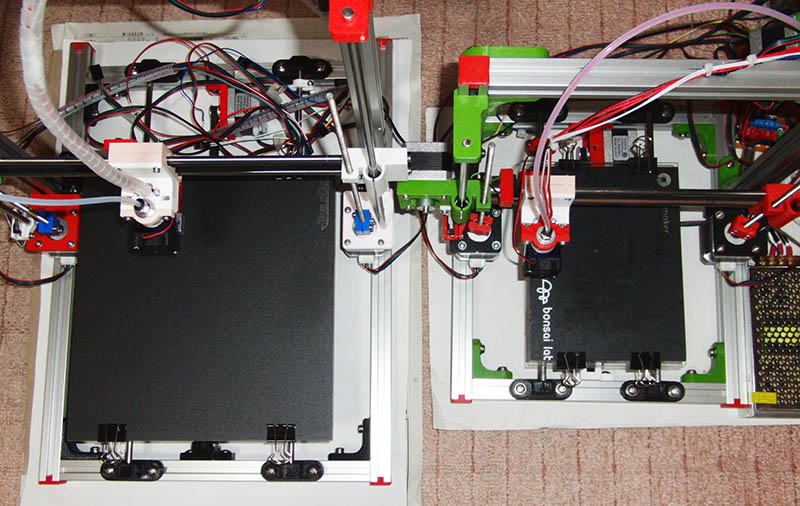
2چ†‹@‚ةژو‚è•t‚¯پB
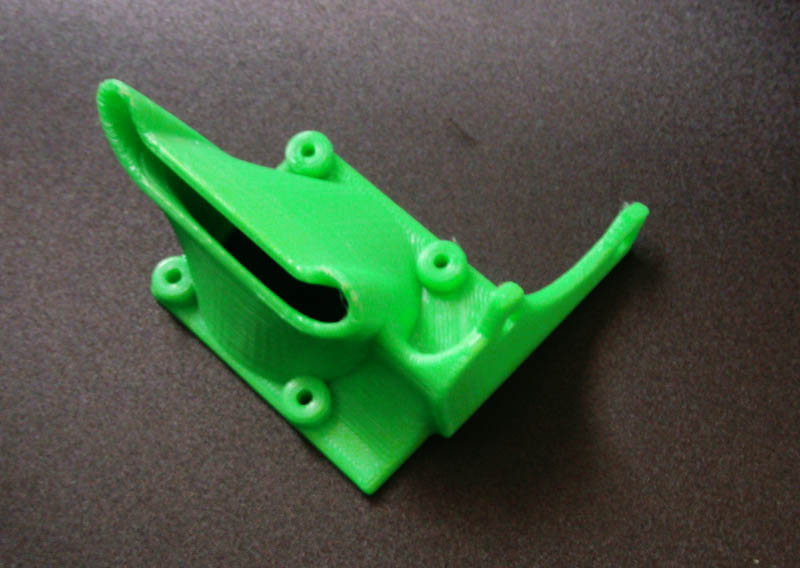
1چ†‹@‚ة‚àگآ‚إƒvƒٹƒ“ƒg‚µ‚ؤژو‚è•t‚¯پB
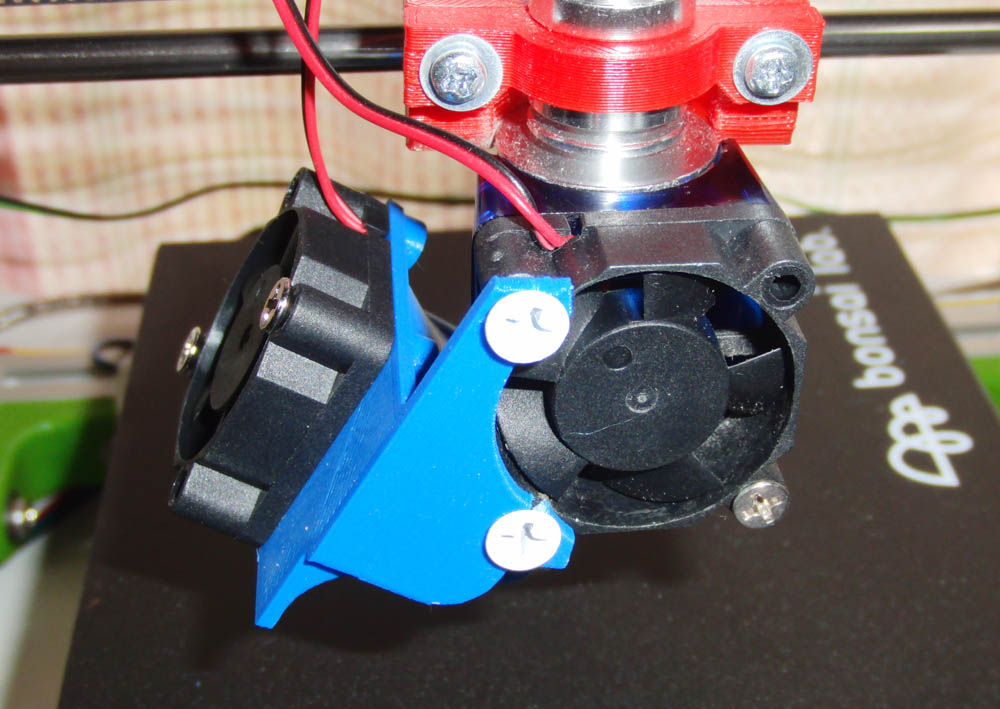
‚±‚ꂾ‚¯‚ج+ƒAƒ‹ƒtƒ@‚إپA"ƒIپ[ƒoپ[ƒnƒ“ƒO" ‚âپA‹——£‚ج’Z‚¢ "Bridge" ‚جˆَچü‚ھ‰آ”\‚ةپB
1000‰~’ِ“x‚ج“ٹژ‘‚إ‚àŒّ‰ت‚ح‘ه‚«‚¢پB
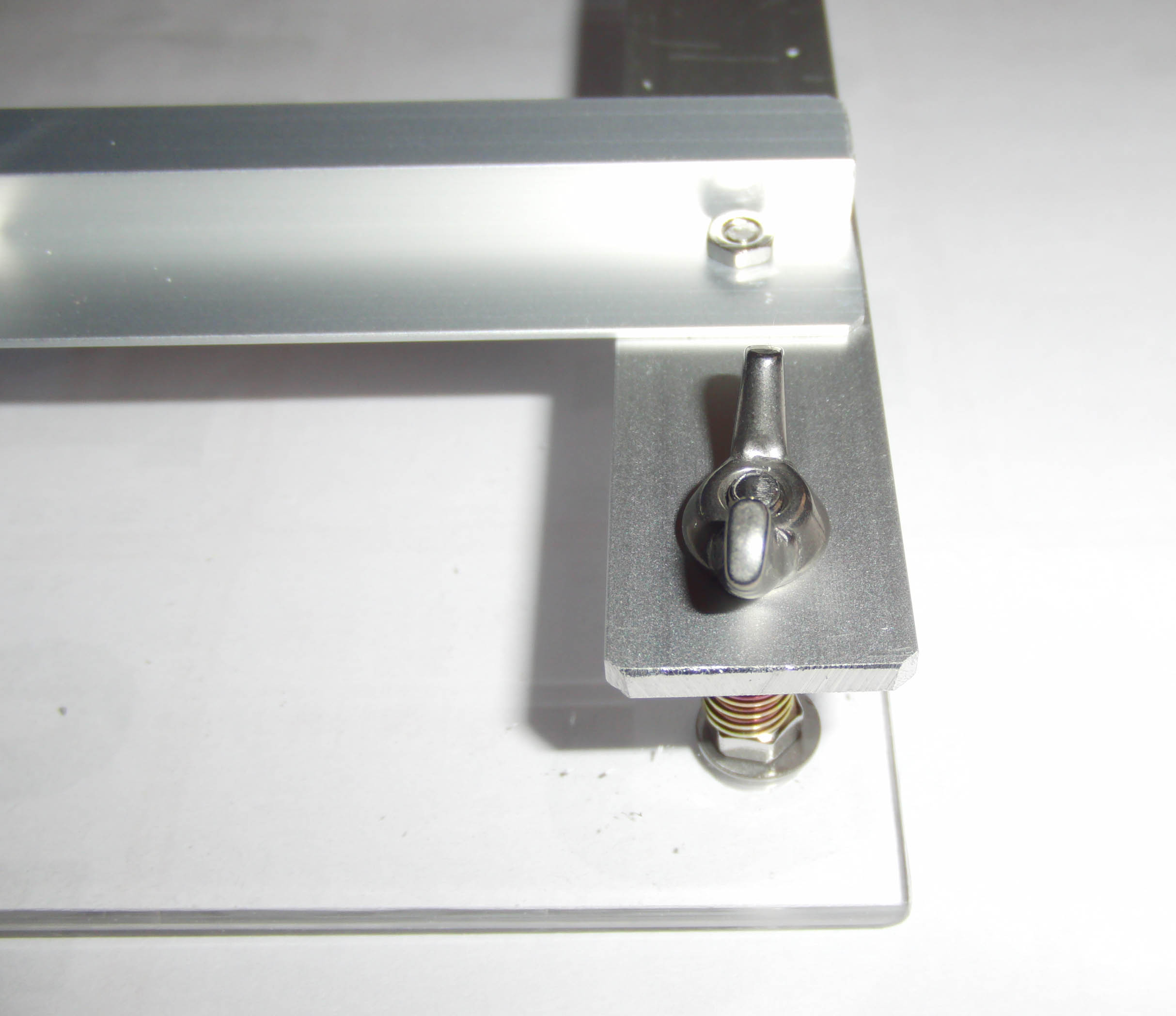
ƒzƒbƒgƒGƒ“ƒh‚ض‚جژو‚è•t‚¯‚حپA15ƒ~ƒٹ‚جŒy“VƒrƒX‚ھ‹Kٹi‚ةƒsƒbƒ^ƒٹپB
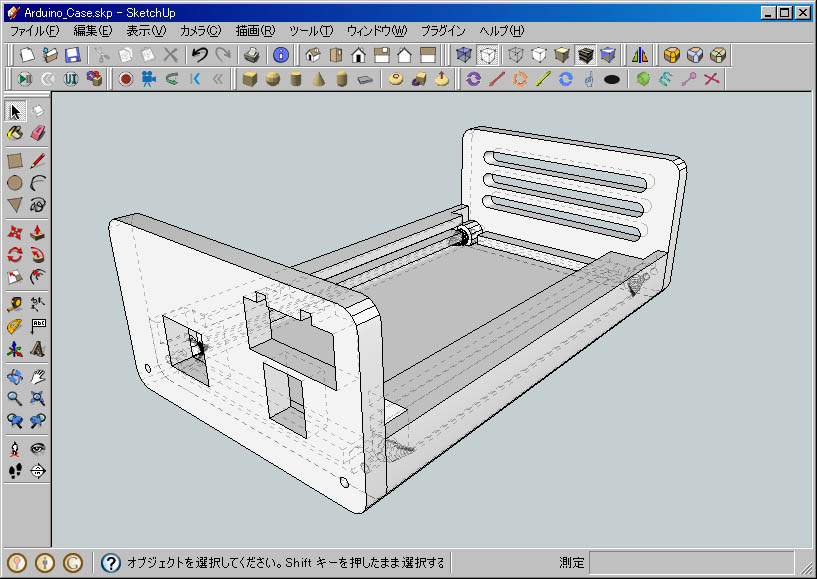
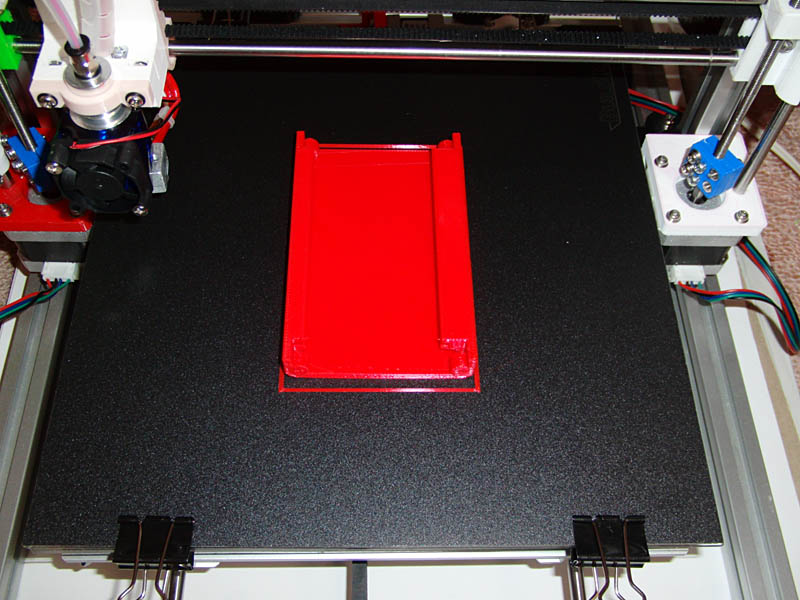
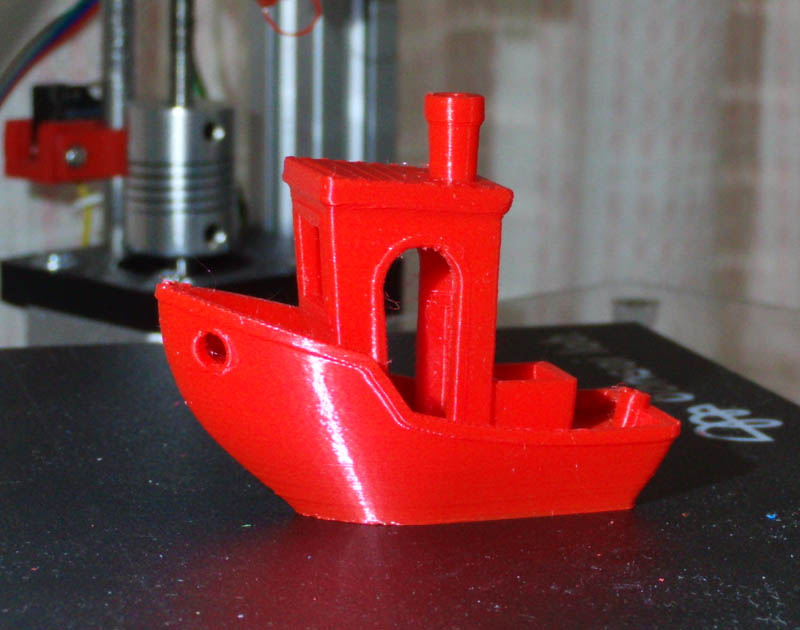
ƒTƒ|پ[ƒg–³‚µ‚ج "Bridge" ƒvƒٹƒ“ƒgپB
ƒIپ[ƒoپ[ƒnƒ“ƒO‚ج—گ‚ê‚ح‚»‚ê‚ظ‚ا–ع—§‚½‚ب‚¢پB
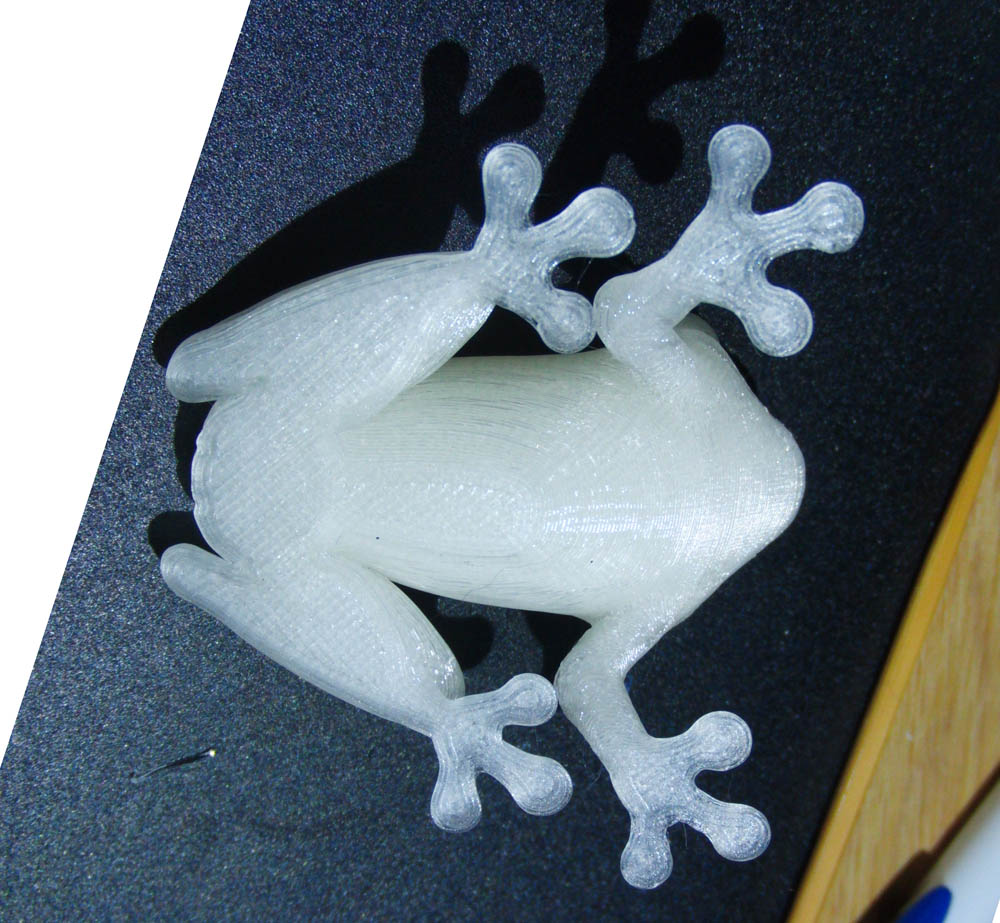
ƒIپ[ƒoپ[ƒnƒ“ƒO‚جگد‘w—گ‚ê‚ًƒeƒXƒg‚·‚邽‚ك‚ة‚و‚ژg‚ي‚ê‚ؤ‚¢‚éپuƒJƒGƒ‹پv‚ئپuBoatپv‚جƒ‚ƒfƒ‹پB
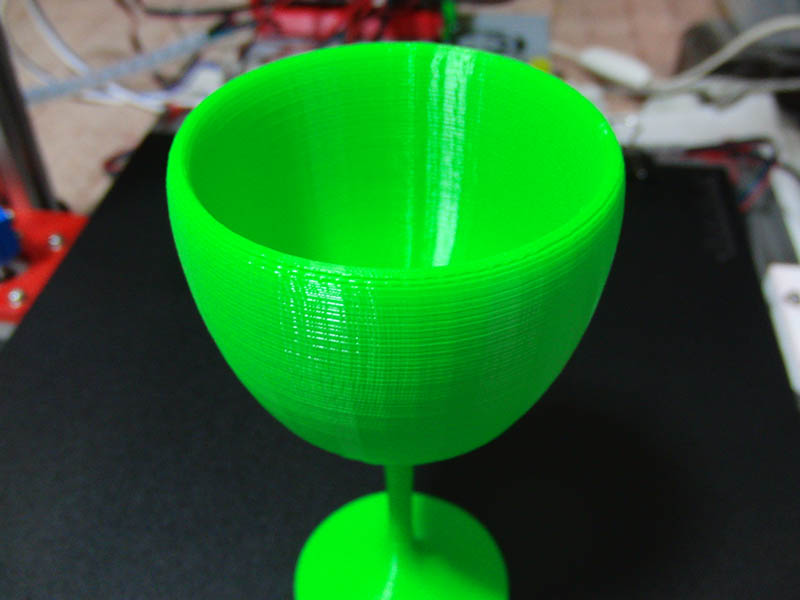
2چ†‹@‚ج—â‹pƒtƒ@ƒ“–³‚µ‚إƒvƒٹƒ“ƒg‚µ‚½ƒJƒGƒ‹‚ج‚¨• پB
گد‘wƒsƒbƒ`‚ح0.3ƒ~ƒٹ‚ئچr‚¢‚ھپA—گ‚ê‚âپAگد‘wژ‚جکc‚حٹm”Fڈo—ˆ‚éپB

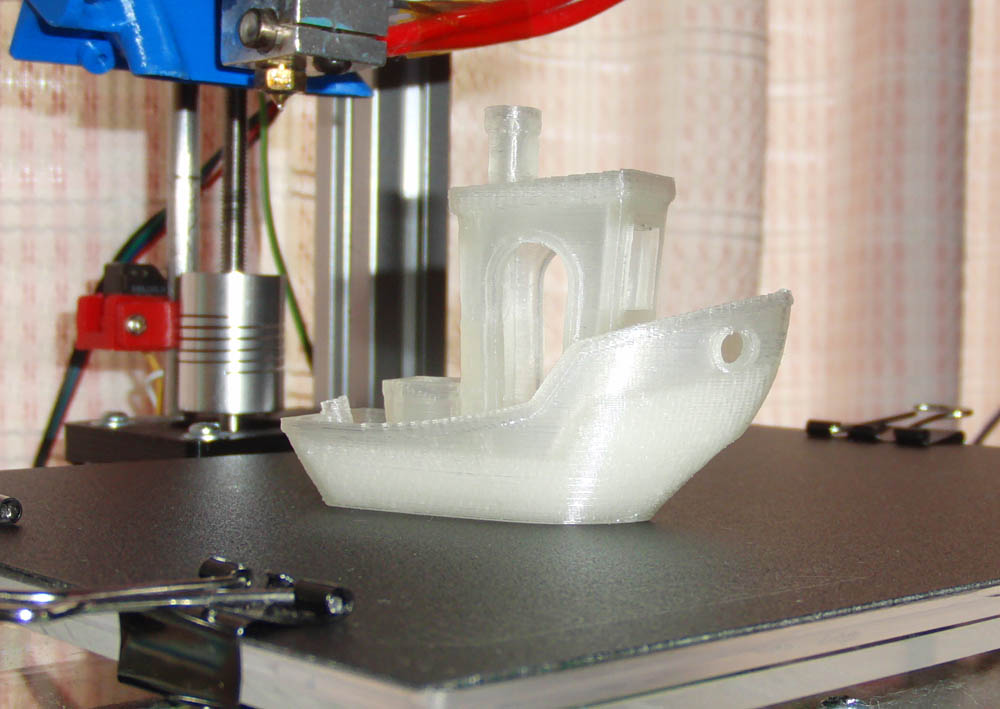
—â‹pƒtƒ@ƒ“‚ًژو‚è•t‚¯‚½Œم‚ةƒvƒٹƒ“ƒg‚µ‚½ƒJƒGƒ‹‚ج‚¨• پB
ƒtƒBƒ‰ƒپƒ“ƒg‚جگF‚حˆظ‚ب‚é‚ھ—گ‚ê‚âپAکc‚ح‚ظ‚عƒ[ƒچپB
‚±‚ê‚à "Bridge" ‚â "ƒIپ[ƒoپ[ƒnƒ“ƒO" ‚إ—ا‚ژg‚ي‚ê‚ؤ‚¢‚郂ƒfƒ‹پB
Printer: Self_made
Rafts: No
Supports: No
Resolution: 0.2
Infill: 50%
گش‚جƒtƒBƒ‰ƒپƒ“ƒg
Printer: Self_made
Rafts: No
Supports: No
Resolution: 0.2
Infill: 50%
پu“ء‹–گط‚ê‚ة‚و‚ء‚ؤˆê‹C‚ةٹJ”‚ھگi‚ٌ‚إ‚¢‚éپEپEپv‚ب‚ا‚ج‹Lژ–پi‰؛‚جƒٹƒ“ƒNپj‚ًŒ©‚©‚¯‚½‚ھپAژ–ژہFDM•ûژ®‚ج3Dƒvƒٹƒ“ƒ^پ[‚إƒtƒ‹ƒJƒ‰پ[ƒvƒٹƒ“ƒgڈo—ˆ‚éژ‘م‚à‚»‚¤‰“‚‚ح‚ب‚³‚»‚¤‚¾پB
http://i-maker.jp/diamond-hotend-7370.html



 “Y•tƒtƒ@ƒCƒ‹
“Y•tƒtƒ@ƒCƒ‹