|
پuD:پvƒhƒ‰ƒCƒu‚ةپuinstant-ngpپvƒtƒHƒ‹ƒ_‚ًچؤچ\’z‚µپAƒTƒ“ƒvƒ‹‚ج‚«‚آ‚ثژتگ^‚ً”qژط‚µ‚ؤ3D‰»ƒeƒXƒgپB
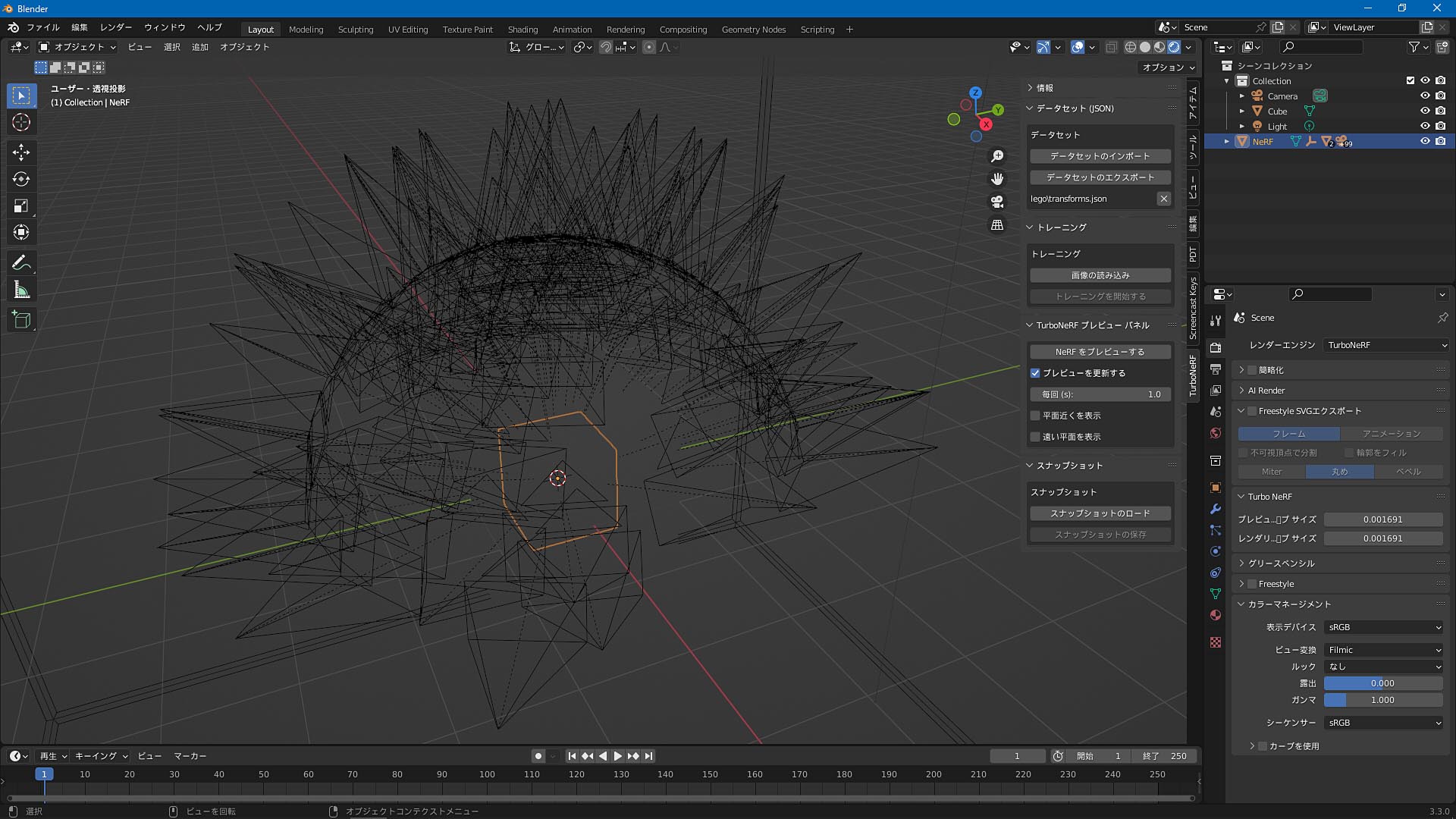
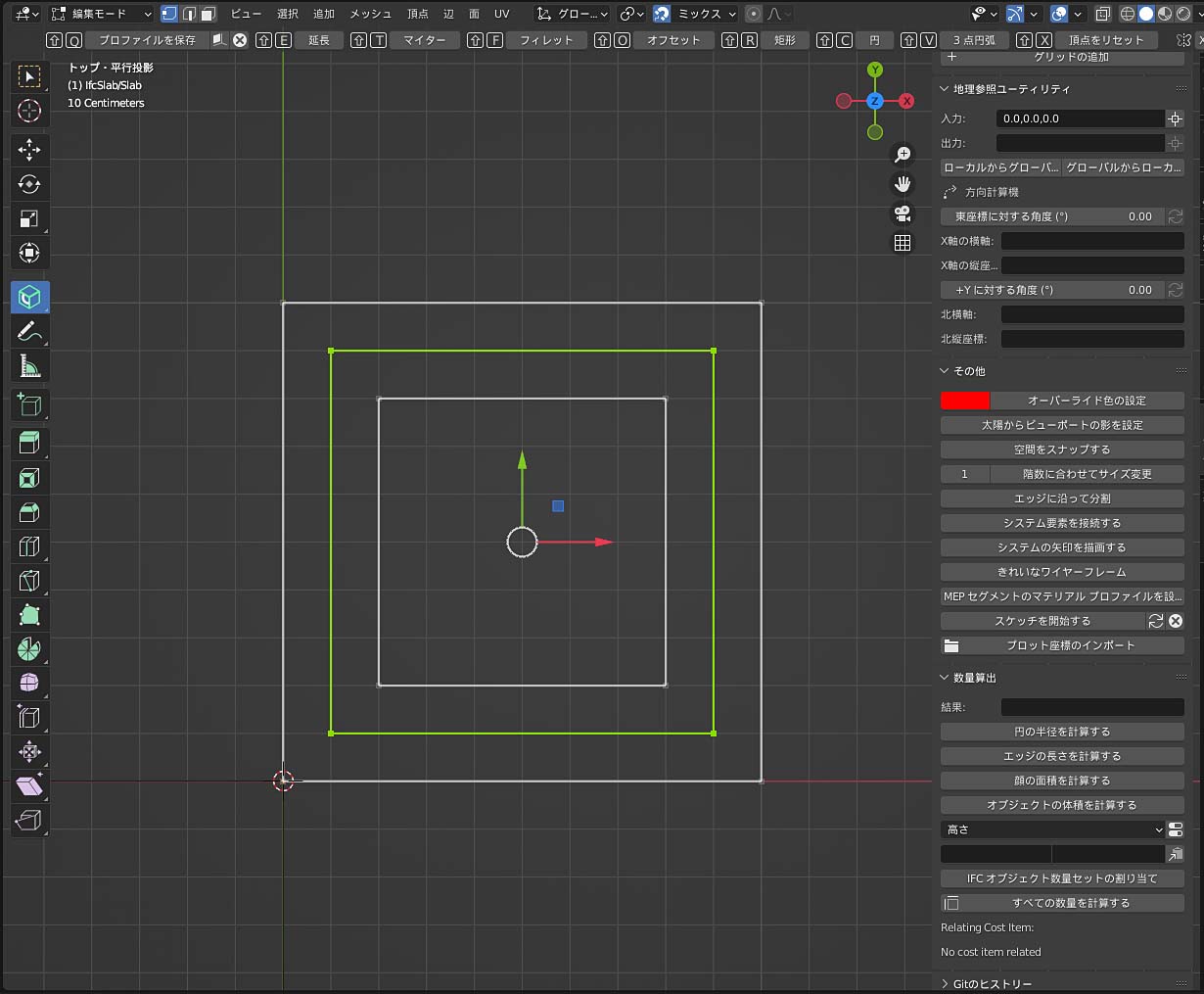
‚ ‚ئ‚حƒuƒŒƒ“ƒ_پ[‚ئ‚ج‹¤—L‚ج‚فپB
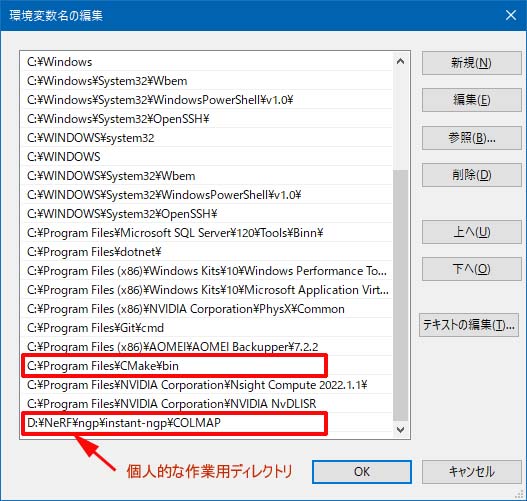
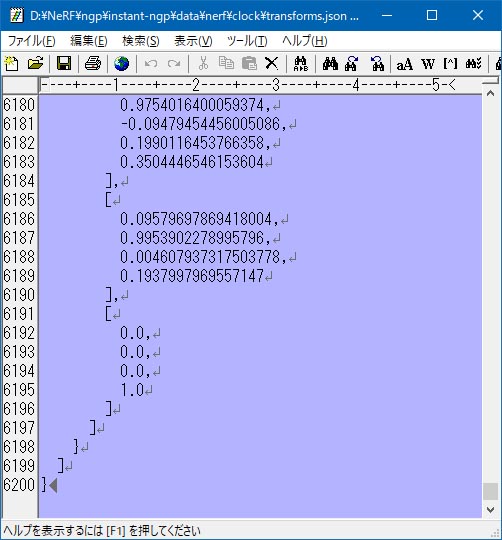
ƒfپ[ƒ^گê—p‚ةچؤچ\’zŒم‚µ‚½پAŒآگl“I‚بƒtƒHƒ‹ƒ_پ[‚جƒpƒX
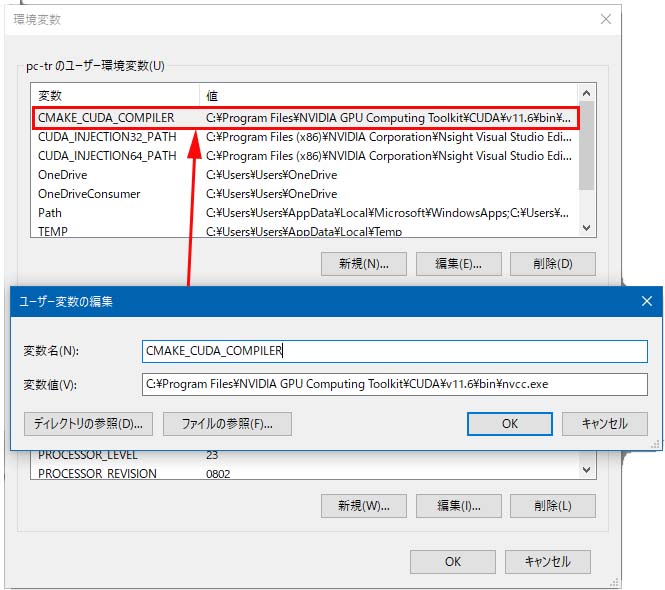
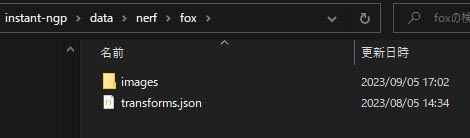
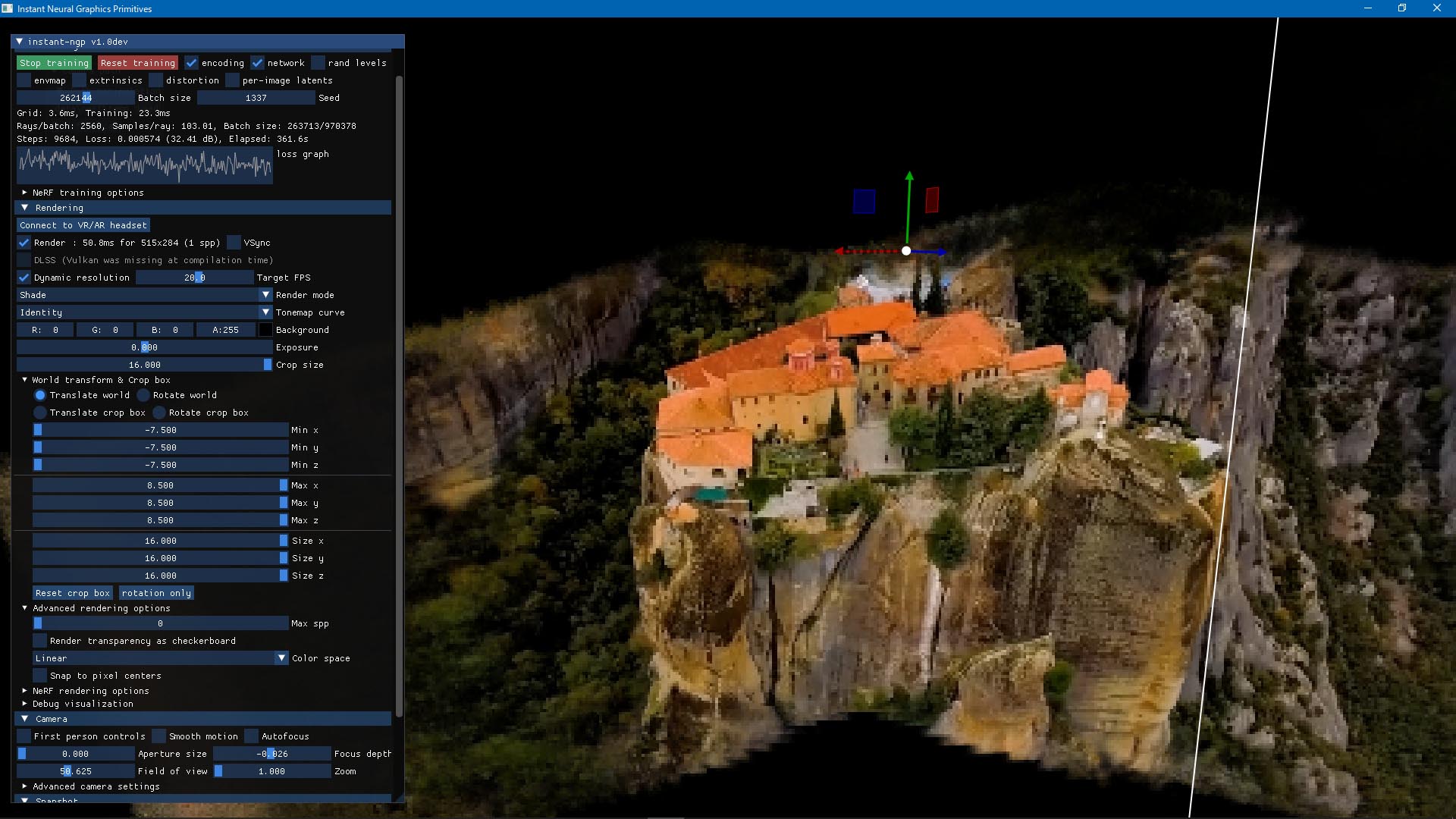
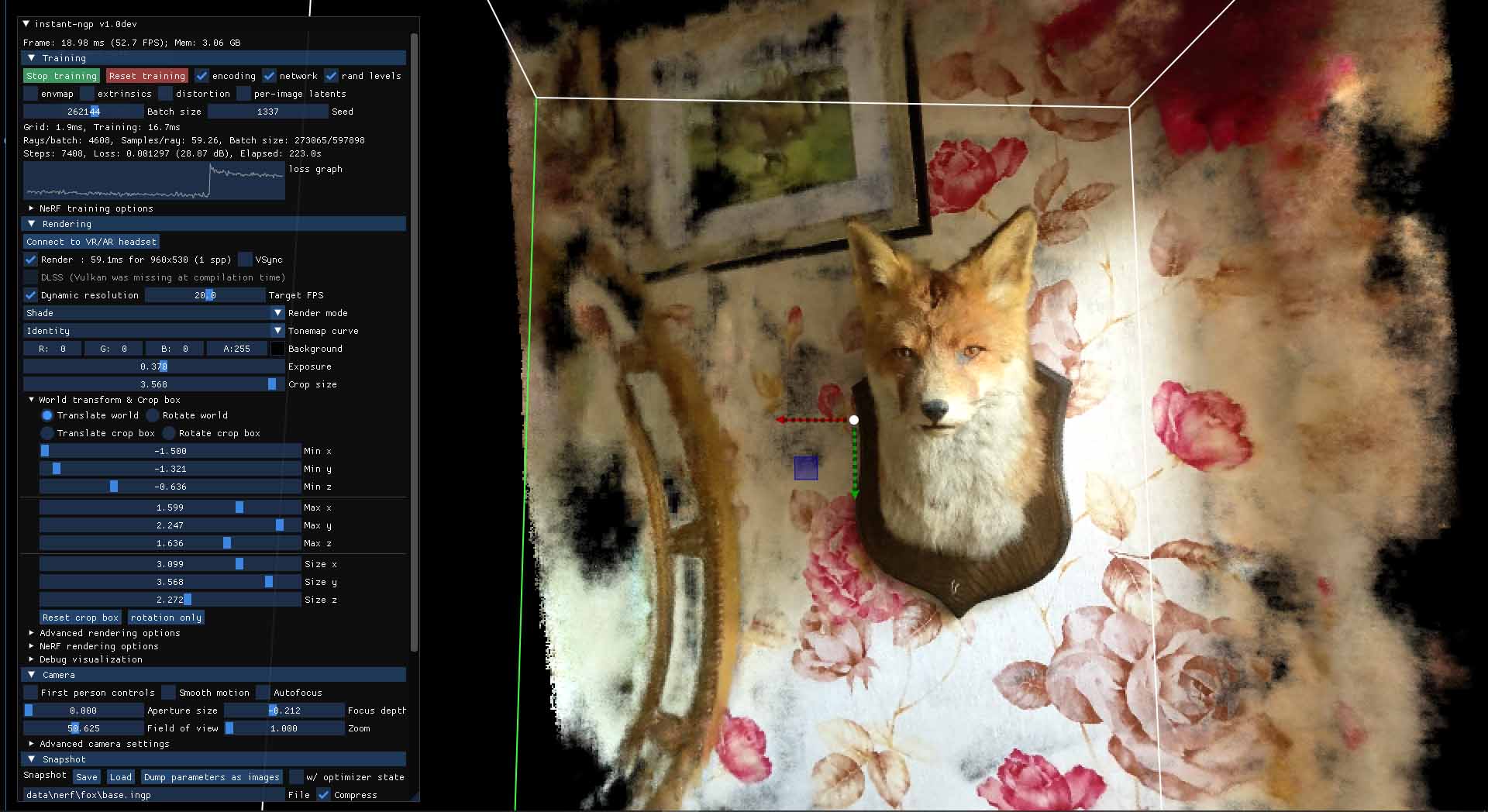
پuinstant-ngp.exeپv‚ة“ا‚فچ‚ٌ‚¾پuNerfپvٹwڈKƒfپ[ƒ^
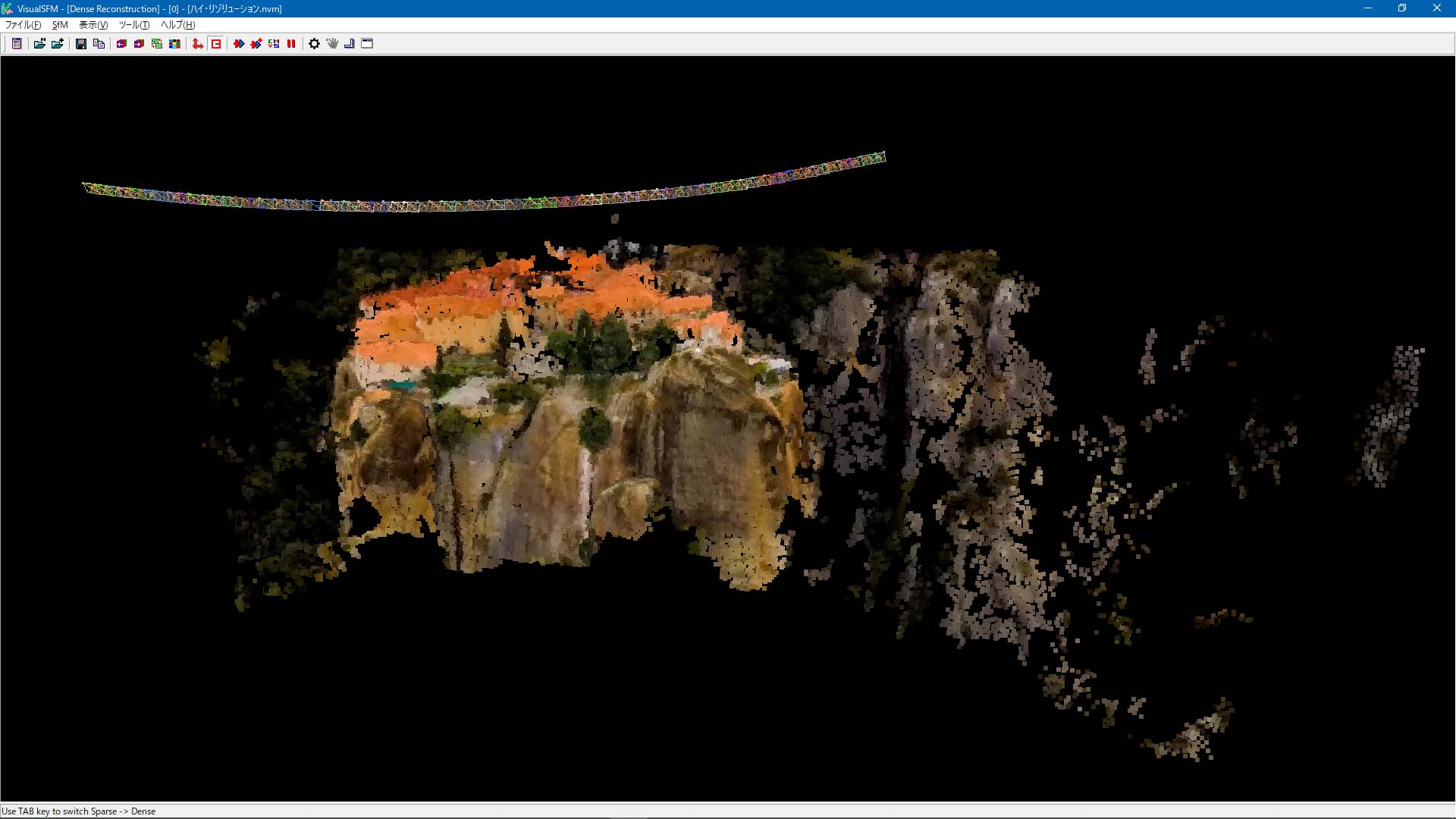
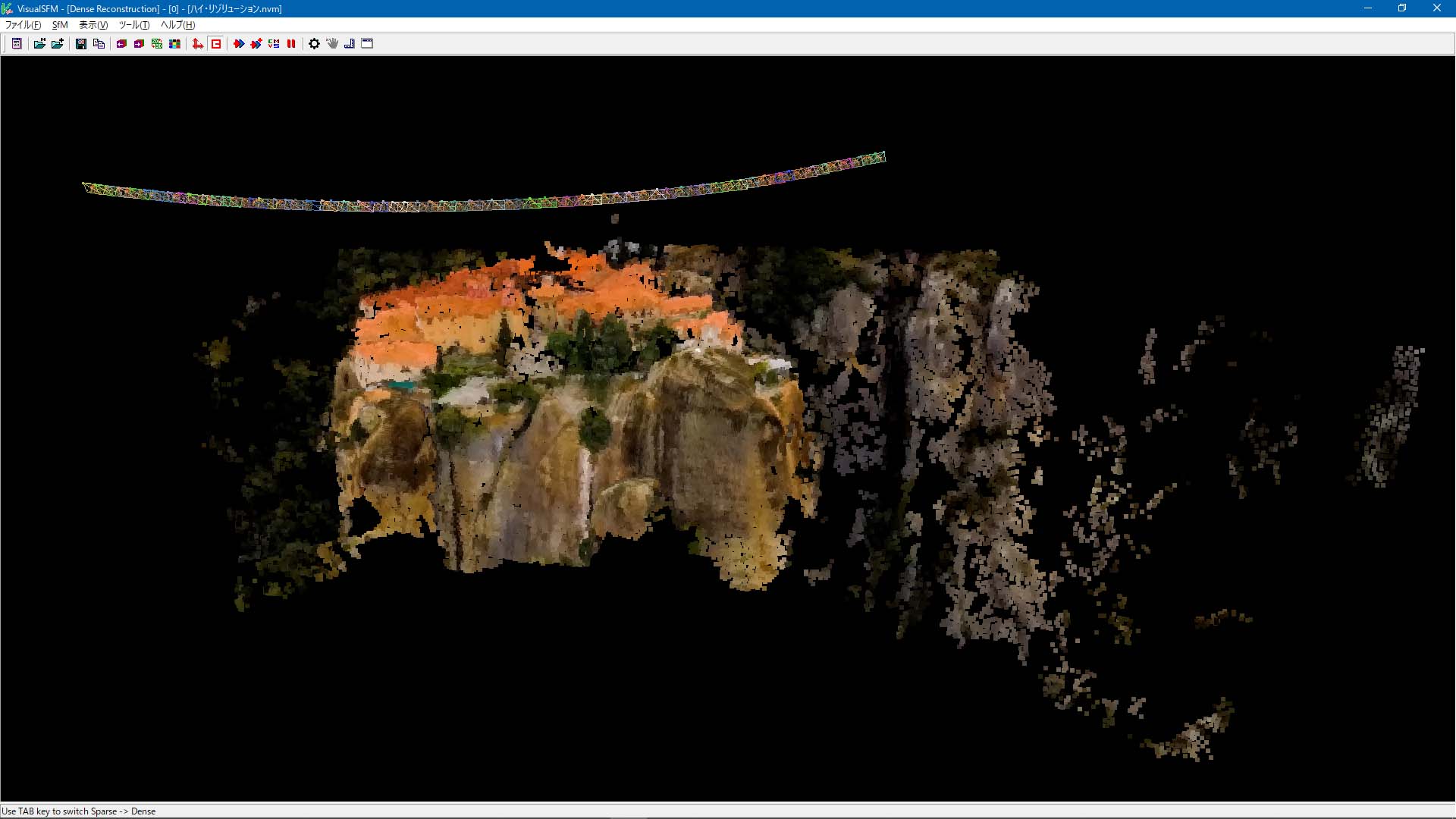
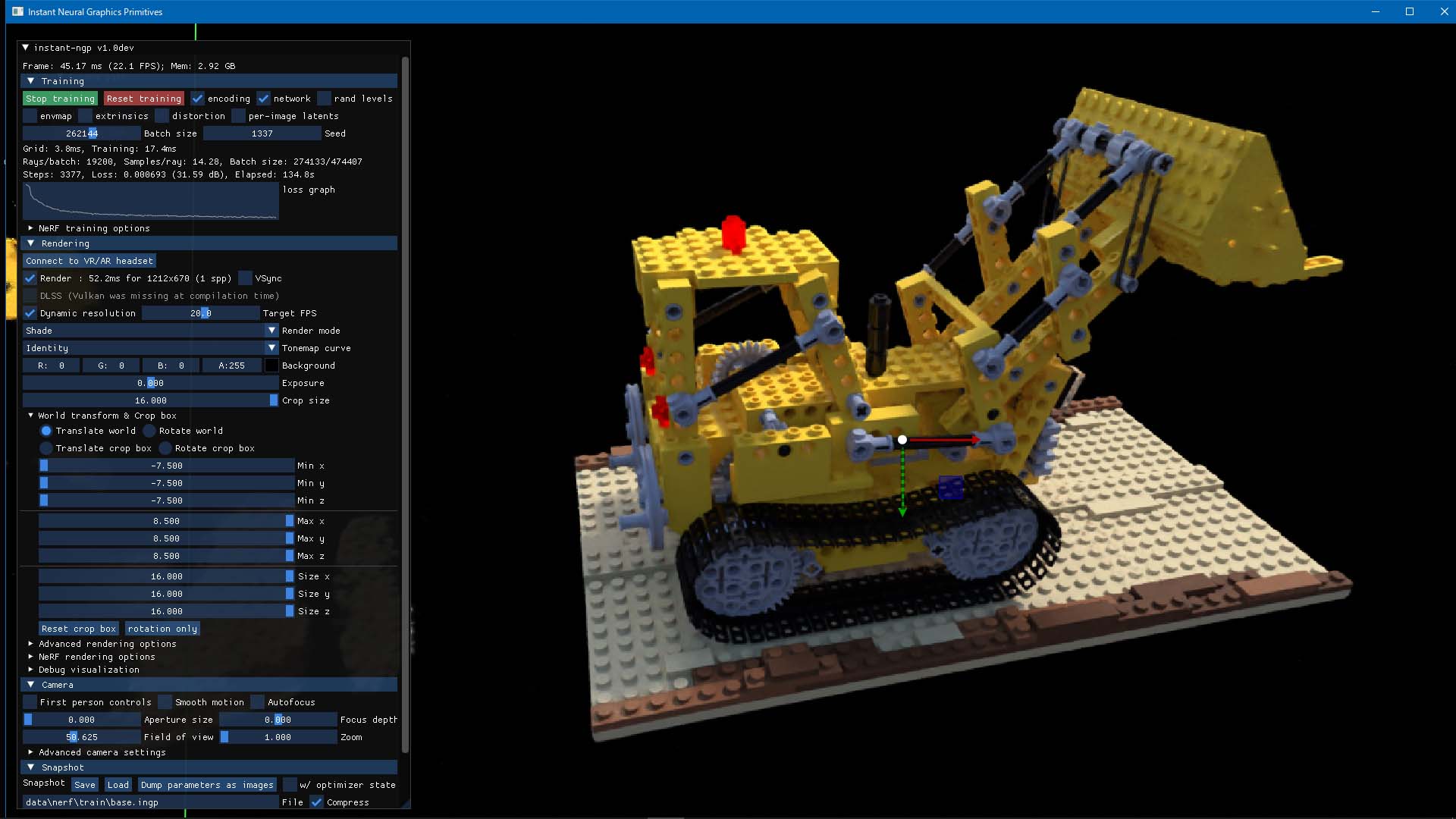
“¯‚¶‚ƒTƒ“ƒvƒ‹‰و‘œ‚©‚çگ¶گ¬‚µ‚½پutrainپvٹwڈKƒfپ[ƒ^‚ج3D‰»
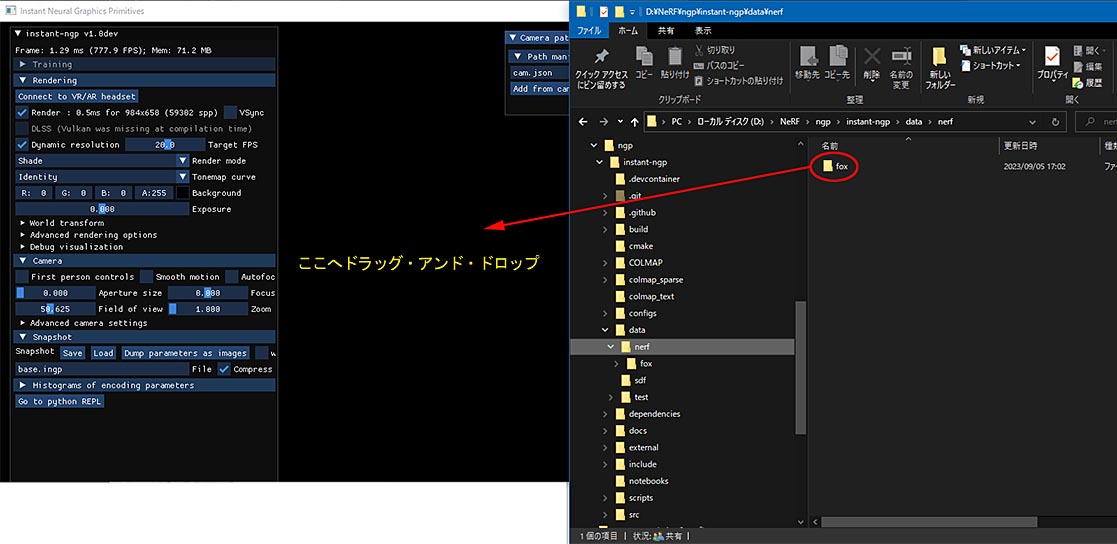
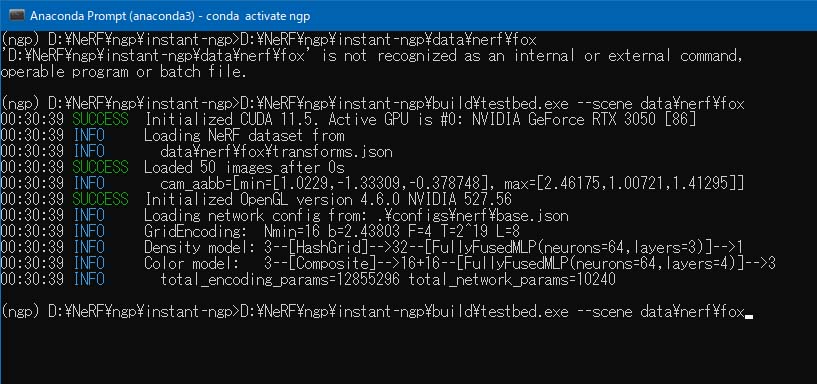
پuinstant-ngp.exeپv‚ًپubuildپvƒtƒHƒ‹ƒ_‚ة‚ ‚éپutestbed.exeپv‚©‚ç‹N“®‚·‚éگà–¾‚ةƒnƒ}‚èپAڈہڈَ‘شپI
پubuildپvƒtƒHƒ‹ƒ_‚ة“WٹJ‚µ‚½پuinstant-ngp.exeپv‚ًپAپutestbed.exeپv‚ةƒtƒ@ƒCƒ‹–¼•دچX‚·‚邱‚ئ‚إ–³ژ–’EڈoپB
‚±‚±‚ًژQچl‚ةپA“¯‚¶ڈہ‚ةƒnƒ}‚ء‚½‚ئ‚«‚ح‚¨ژژ‚µ‚ ‚êپB
‹N“®’¼Œم‚جˆس–،•s–¾‚ب‘€چى“®‰و‚ً“Y•tپBپ@‚¢‚آ‚©ٹµ‚ê‚é..ƒnƒYپB
 “Y•tƒtƒ@ƒCƒ‹
|