SketchUcam‚âپA‘¼‚جƒAƒvƒٹ‚ًژg‚ء‚½CNCٹwڈK‚ج‚½‚ك‚ةچw“üپB
“ح‚¢‚½‘ىڈمCNC‚جژتگ^پB
ژ„“I‚ب—Dگوژ–چ€‚©‚çپA‘g‚ف—§‚ؤ‚ح“–•ھگو‚ة‚ب‚è‚»‚¤‚¾پB
•t‘®‚µ‚ؤ‚¢‚éڈ¬‚³‚بƒ‚پ[ƒ^پ[‚ئپAƒRƒŒƒbƒgƒ`ƒƒƒbƒN‚حپAژï–،‚ج—جˆوپB
ژہ—p“I‚ب—p“r‚إ‚حپAچإ’لŒہپA‚±‚ê‚ç‚جŒًٹ·‚ھ•K—v‚ة‚ب‚é‚©‚à‚µ‚ê‚ب‚¢پB

–{‘جپAƒtƒŒپ[ƒ€ƒpپ[ƒc

ƒAƒ‹ƒ~ƒxƒbƒh‚ئپA”ٍژU–hژ~—p‚جƒAƒNƒٹƒ‹”آپB

“dŒ¹‚ئپACNCƒVƒXƒeƒ€پuCandleپv‚âƒTƒ“ƒvƒ‹ƒfپ[ƒ^‚ج“ü‚ء‚½USB

ƒlƒWپEƒiƒbƒg—ق

ژ²‚ج‹ى“®ˆبٹO‚حپAƒRƒ“ƒgƒچپ[ƒ‰‚âپAƒٹƒ~ƒbƒ^پ[‚ب‚ا‚جƒXƒCƒbƒ`—ق‚ح•t‘®‚µ‚ؤ‚¢‚ب‚¢پB
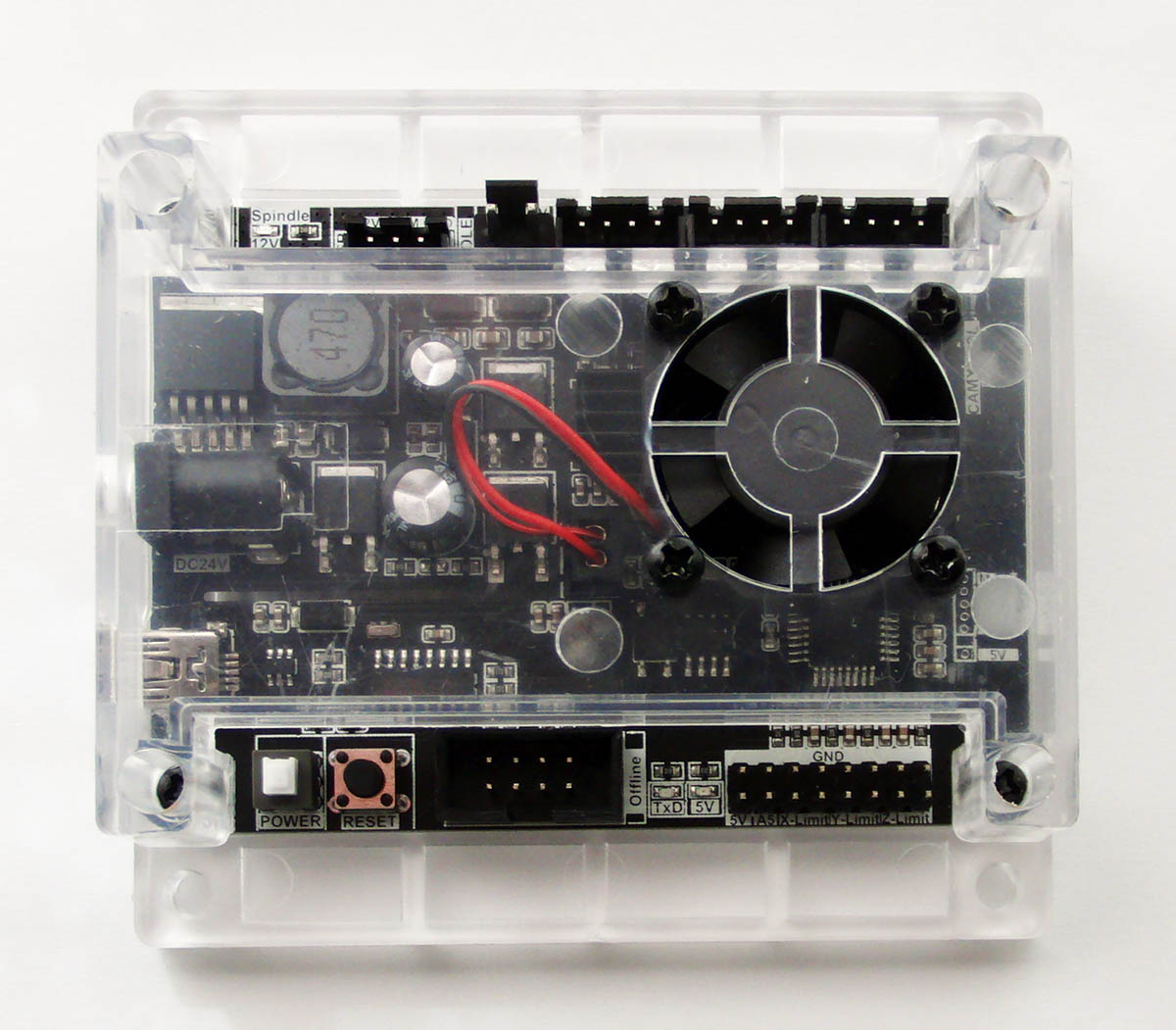
چw“üژ‚جGRBLپEƒ{پ[ƒhڈ‰ٹْگف’è
Grbl 1.1f ['$' for help]
>>> $$
$0=10 پ@ Step pulse, microseconds
$1=25 پ@ Step idle delay, milliseconds
$2=0 پ@ Step port invert, mask
$3=2 پ@ Direction port invert, mask
$4=0 پ@ Step enable invert, boolean
$5=0 پ@ Limit pins invert, boolean
$6=0 پ@ Probe pin invert, boolean
$10=1 پ@ Status report, mask
$11=0 پ@ Junction deviation, mm
$12=0 پ@ Arc tolerance, mm
$13=0 پ@ Report inches, boolean
$20=0 پ@ Soft limits, boolean
$21=0 پ@ Hard limits, boolean
$22=0 پ@ Homing cycle, boolean
$23=0 پ@ Homing dir invert, mask
$24=2 پ@ Homing feed, mm/min
$25=5 پ@ Homing seek, mm/min
$26=2 پ@ Homing debounce, milliseconds
$27=1 پ@ Homing pull-off, mm
$30=1 پ@ Max spindle speed, RPM
$31=0 پ@ Min spindle speed, RPM
$32=0 پ@ Laser mode, boolean
$100=800.000 پ@ X steps/mm
$101=800.000 پ@ Y steps/mm
$102=800.000 پ@ Z steps/mm
$110=1000.000 پ@ X Max rate, mm/min
$111=1000.000 پ@ Y Max rate, mm/min
$112=600.000 پ@ Z Max rate, mm/min
$120=30.000 پ@ X Acceleration, mm/sec^2
$121=30.000 پ@ Y Acceleration, mm/sec^2
$122=30.000 پ@ Z Acceleration, mm/sec^2
$130=200.000X پ@ X Max travel, mm
$131=200.000Y پ@ Y Max travel, mm
$132=200.000Z پ@ Z Max travel, mm
CNC 3018‚ةٹض‚·‚鑽‚‚ج“±“ü—ل‚ھپuYouTubeپvڈم‚إ”zگM‚³‚ê‚ؤ‚¢‚éپB



 “Y•tƒtƒ@ƒCƒ‹
“Y•tƒtƒ@ƒCƒ‹