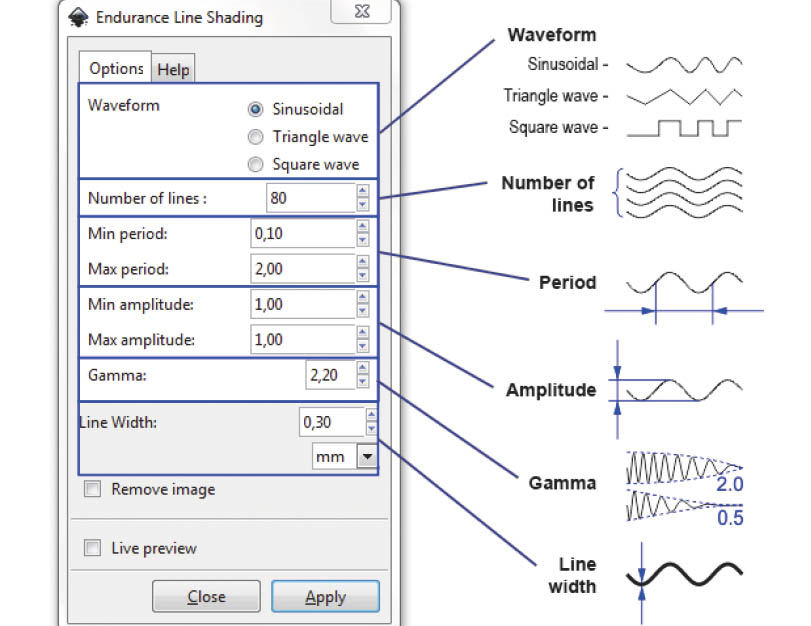
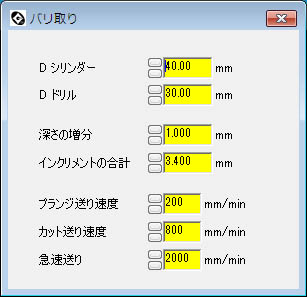
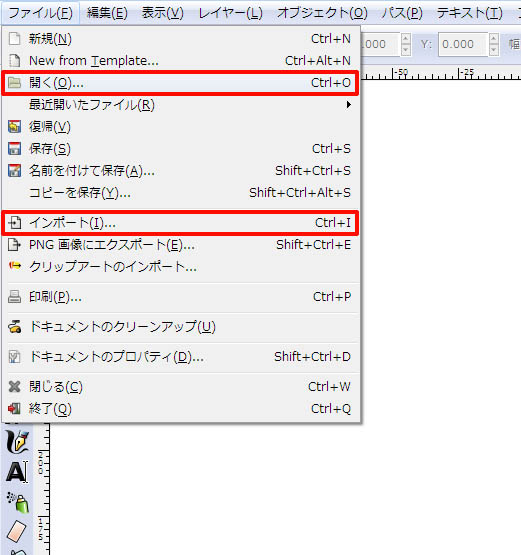
ғtғҢҒ[ғҖ–{‘МӮЙҚҮӮнӮ№ӮДҚЭҢЙғpҒ[ғcӮ©ӮзҺgӮҰӮ»ӮӨӮИӮаӮМӮрҸEӮўҸWӮЯӮйҒB
ӮЗӮкӮӘүҪҸҲӮЙ•K—vӮИғpҒ[ғcӮИӮМӮ©–ўҠm”FҒB
ӮИӮМӮЕӮЖӮиӮ ӮҰӮё‘SғpҒ[ғcӮрғvғҠғ“ғgҒB
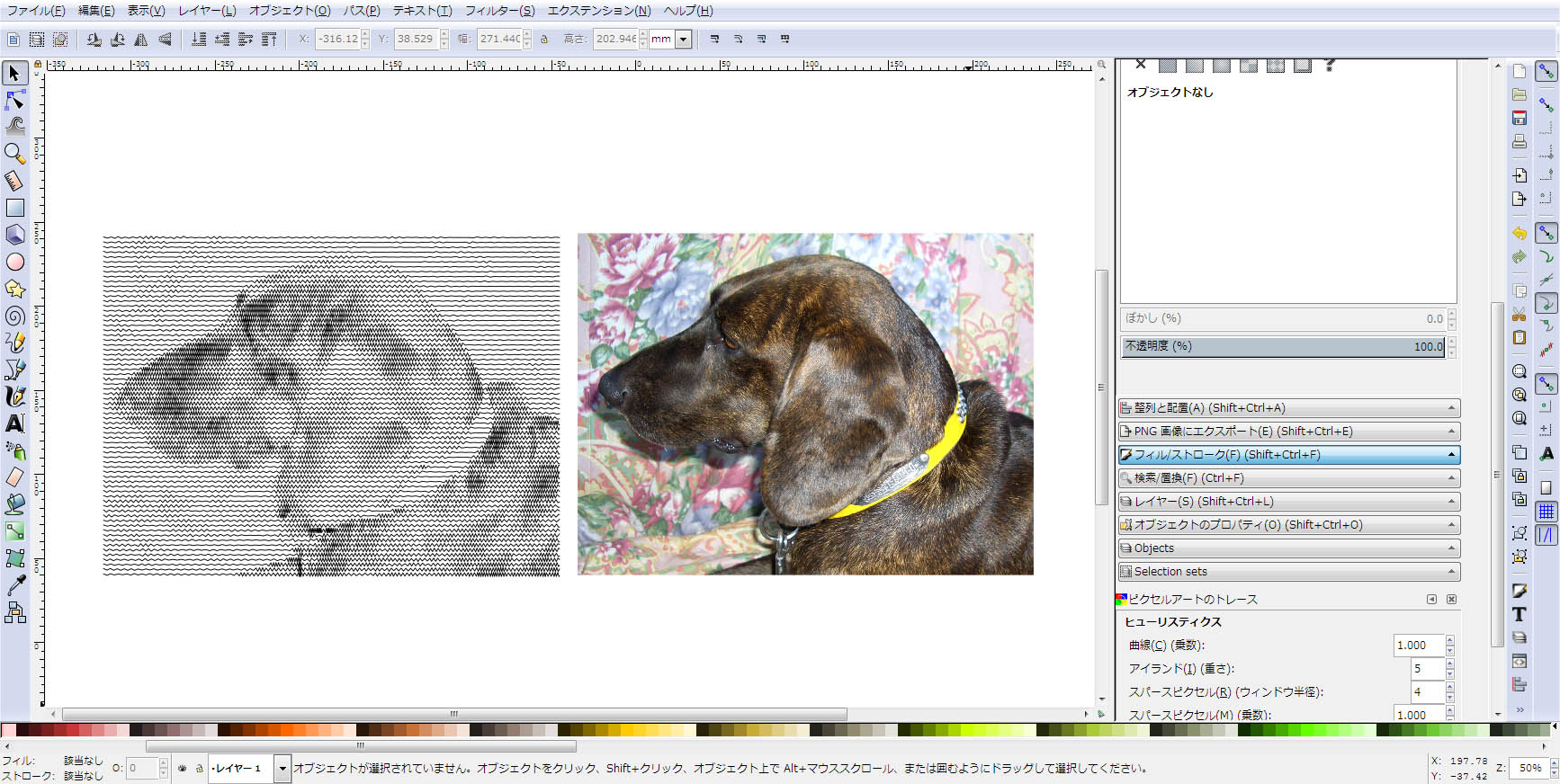
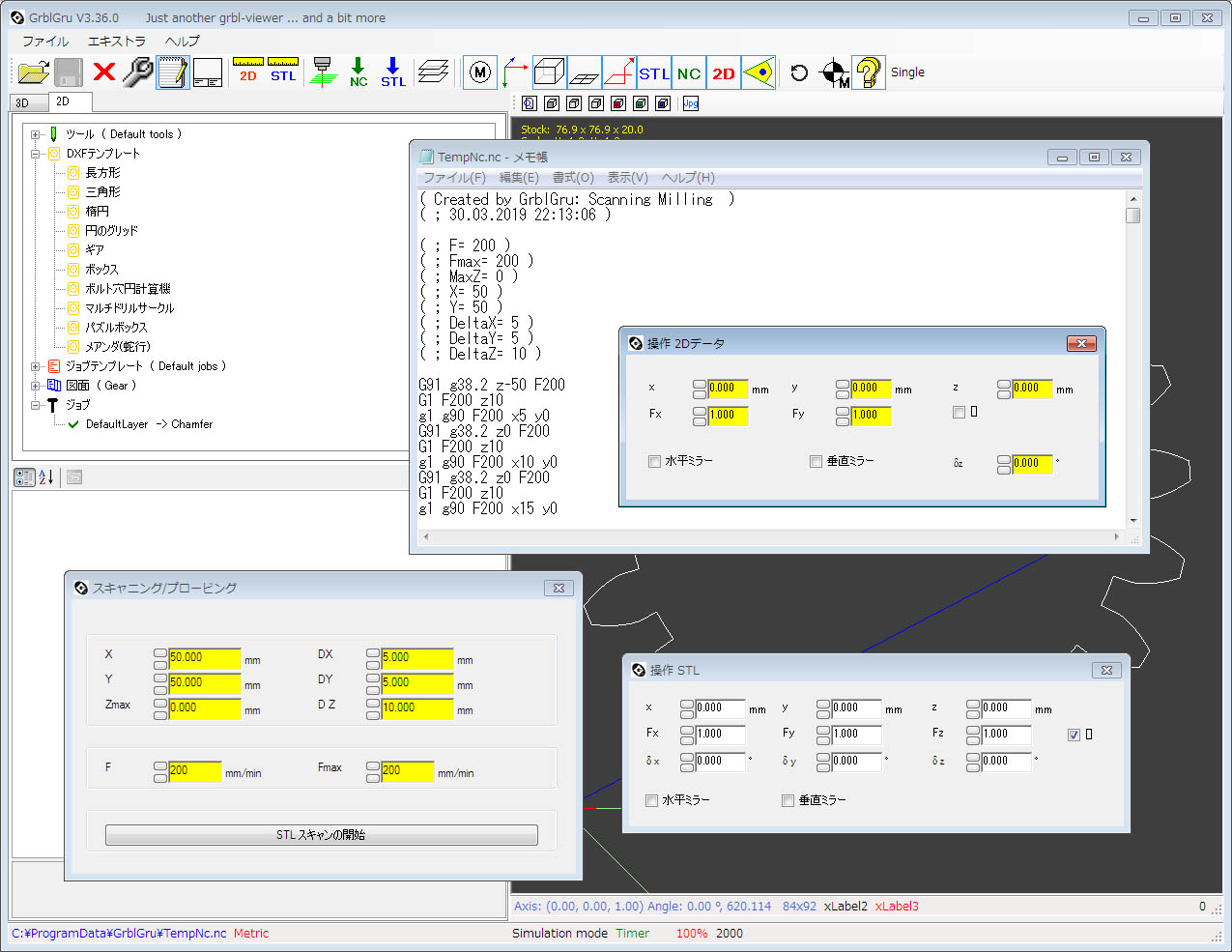
FANӮӘҺ~ӮЬӮБӮДҢ©ӮҰӮйӮӘҒA100%ӮМғtғӢүс“]ҒI
ҺеӮИ“dҺqғpҒ[ғcҒB
ҚЭҢЙҸҲ•ӘӮИӮМӮЕӢKҠiӮа‘өӮБӮДӮўӮИӮўҒBҒiғTғCғYӮМӮЭ“ҜӢKҠiҒj
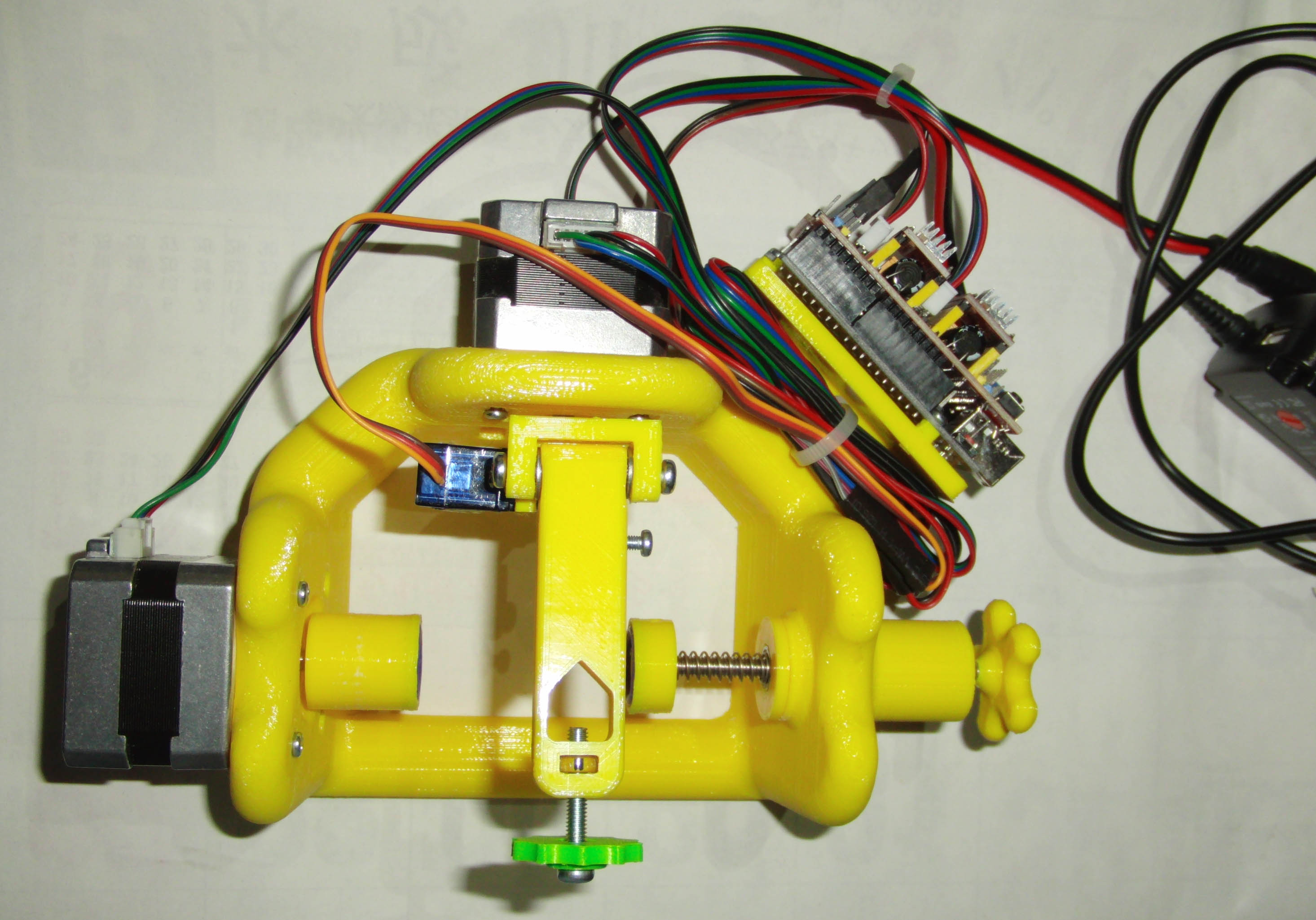
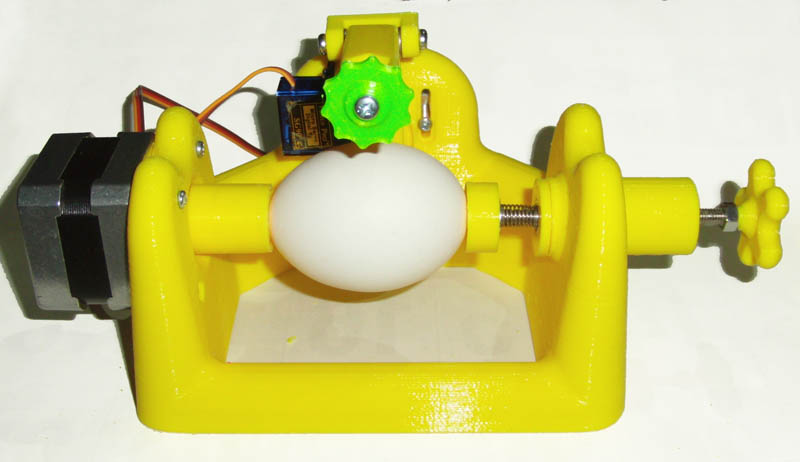
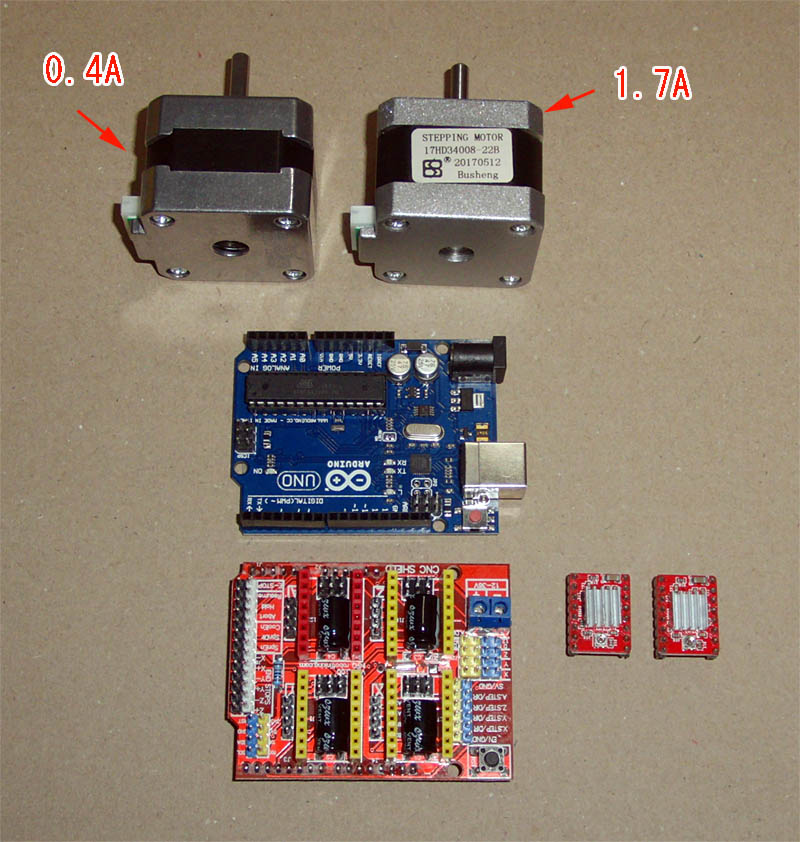
NEMA17ғXғeғbғsғ“ғOғӮҒ[ғ^Ғ[ӮНҒA
Қ¶‘ӨӮӘ0.4AӮЖ
үE‘Ө1.7A
A4988ғhғүғCғoӮМҒAӮ»ӮкӮјӮкӮМӢKҠiӮЙүһӮ¶ӮҪ’Іҗ®ӮӘ•K—vӮЙӮИӮйҒB
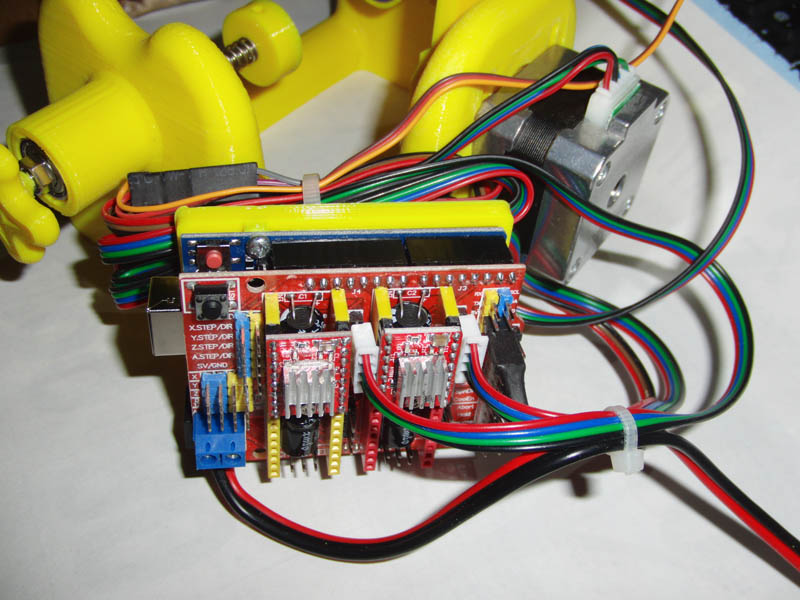
ғ{Ғ[ғhӮНҒA
ARDUINO UNOӮЖ
CNC SHIELDӮр—ҳ—p
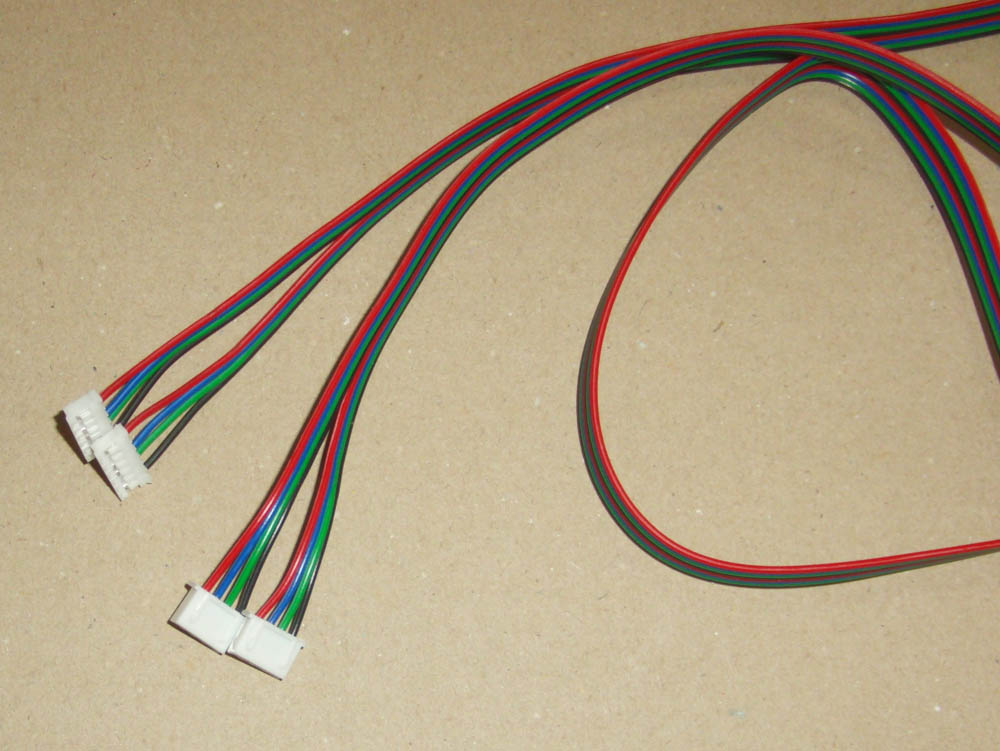
NAMA17—pӮМҗЪ‘ұғPҒ[ғuғӢҒB
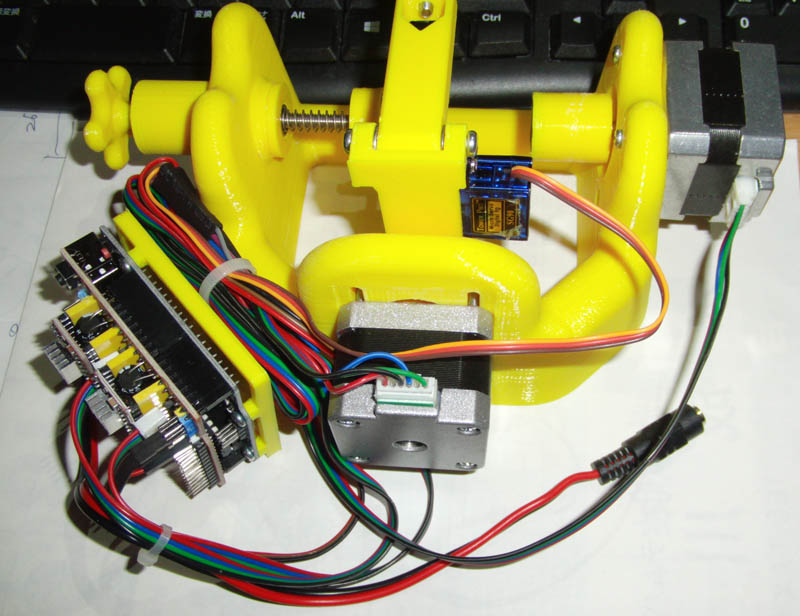
AmazonӮЕ’Қ•¶ӮөӮҪӮӘҒAӮ ӮиӮӘӮҝӮИ’Қ•¶ғ~ғXҒI
•ҪҚs”z’uҒi‘ОҒjӮМғPҒ[ғuғӢӮӘ‘—ӮзӮкӮҪӮ«ӮҪҒB
•Р‘Ө’[ҺqӮӘҒuҗФҒAҗВҒA—ОҒAҚ•ҒvӮҫӮЖӮаӮӨ•Р•ыӮМ’[ҺqӮНҒuҗФҒAҚ•ҒAҗВҒA—ОҒvӮЙӮИӮзӮИӮўӮЖSHIELDӮЙҗЪ‘ұӮөӮҪғoғCғ|Ғ[ғүҢ^ғXғeғbғpҒ[ғӮҒ[ғ^Ғ[ӮНҗіҠmӮИҗUӮй•‘ӮўӮЙӮИӮзӮИӮўҒB
PINӮрҠOӮөӮДҚД”z’uӮ·ӮйӮ©ҒA“r’ҶҗШ’fӮөӮДғnғ“ғ_Ӯр•tӮҜ’јӮ·Ӯ©ҒEҒEҒEҒB
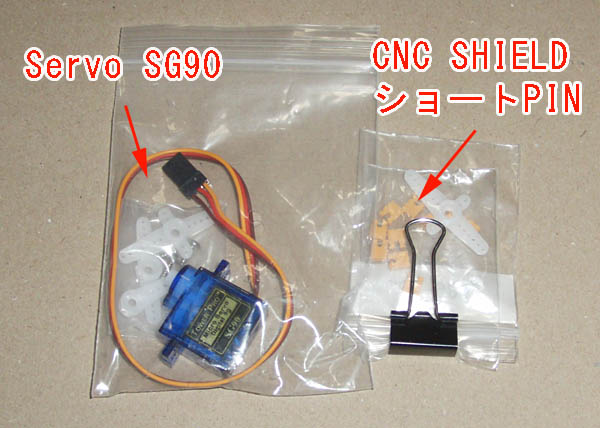
ӮЁӮИӮ¶ӮЭ
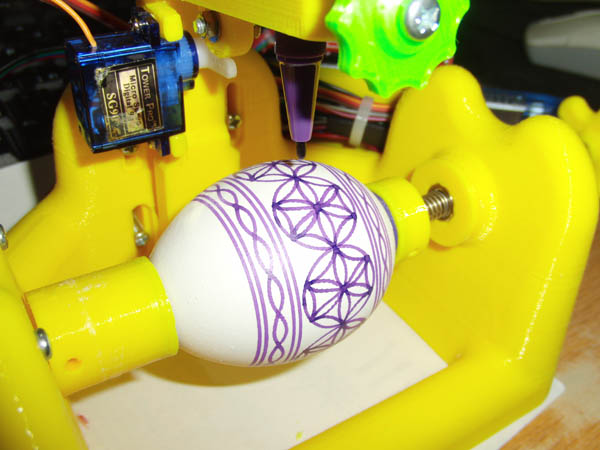
ҒuSG90 ServoҒvӮЖҒA
CNC SHIELDӮМғXғeғbғpҒ[•Әүр”\ҒuLOWҒvӮЖҒuHIҒvӮрҢҲ’иӮ·ӮйғVғҮҒ[ғgPIN
SHIELDӮҫӮҜӮр’Қ•¶ӮөӮДӮаPINӮӘ•t‘®ӮөӮДӮўӮИӮ©ӮБӮҪӮМӮЕ•К“r’Қ•¶ӮөӮҪҒB
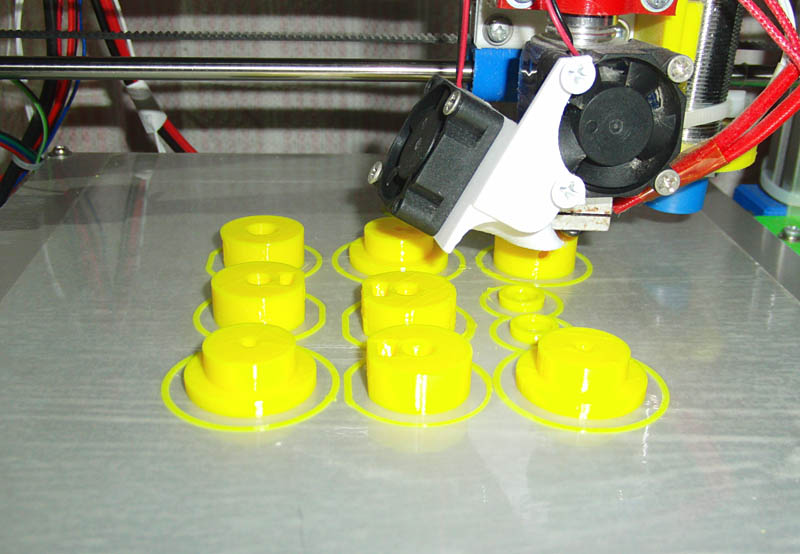
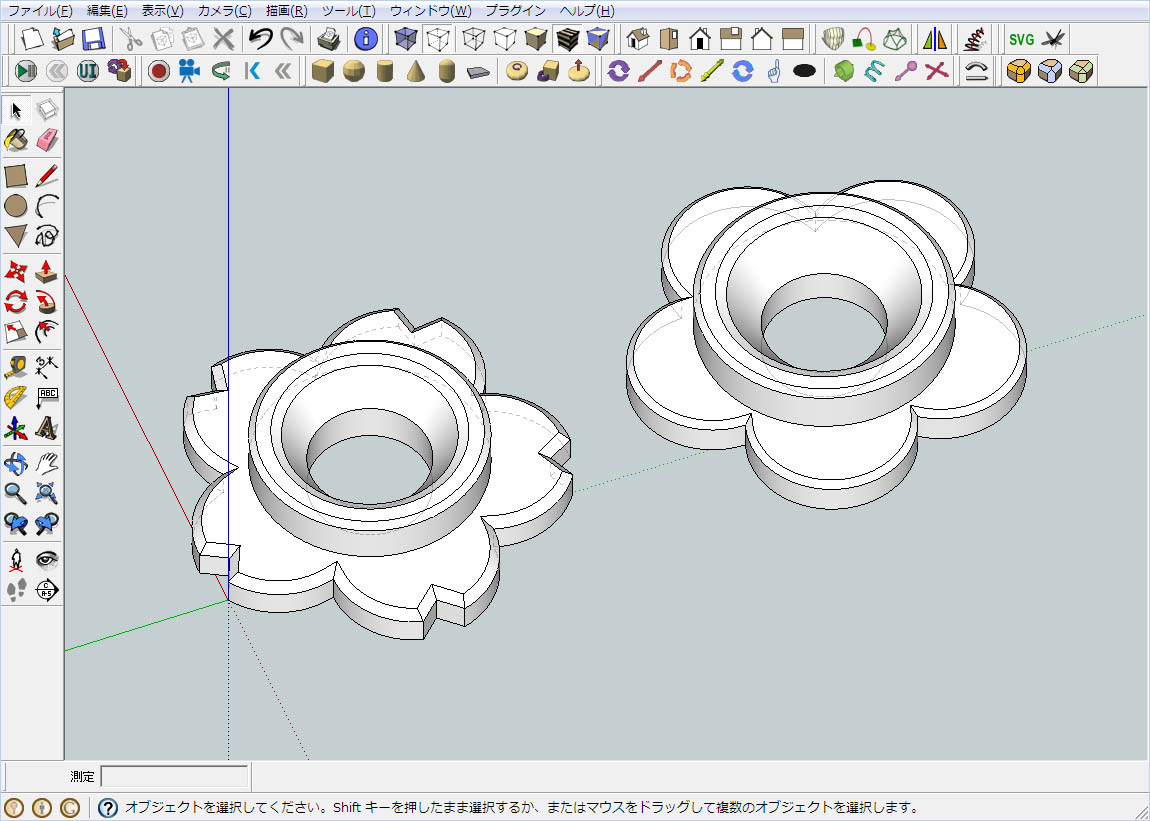
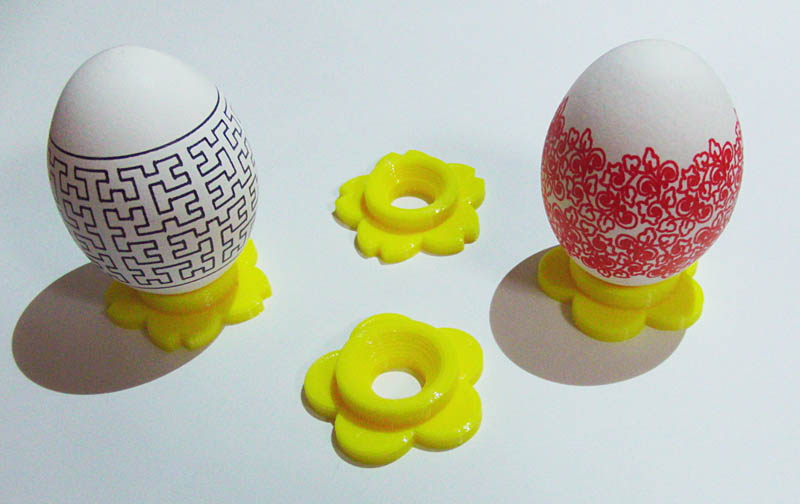
3DғvғҠғ“ғ^Ғ[Ӯрҗ»ҚмӮ·ӮйҚЫҒA6mmӮМғgғҢғCӮЙҚ¬“ьӮөӮДӮўӮҪ5mmӮМ’иҺЪғ{ғӢғgӮрӮ»ӮМӮЬӮЬҢлӮБӮДҚw“ьҒB
Ҳк–{”ғӮўӮ·ӮйӮЖӮ«ӮМ—ҺӮЖӮөҢҠӮЙӮЬӮсӮЬӮЖ—ҺӮҝӮҪҒB
Һw’иӮМғpҒ[ғcӮН3mmӮҫӮӘҒAҚЎүсӮНӮұӮкӮрҺg—pҒB

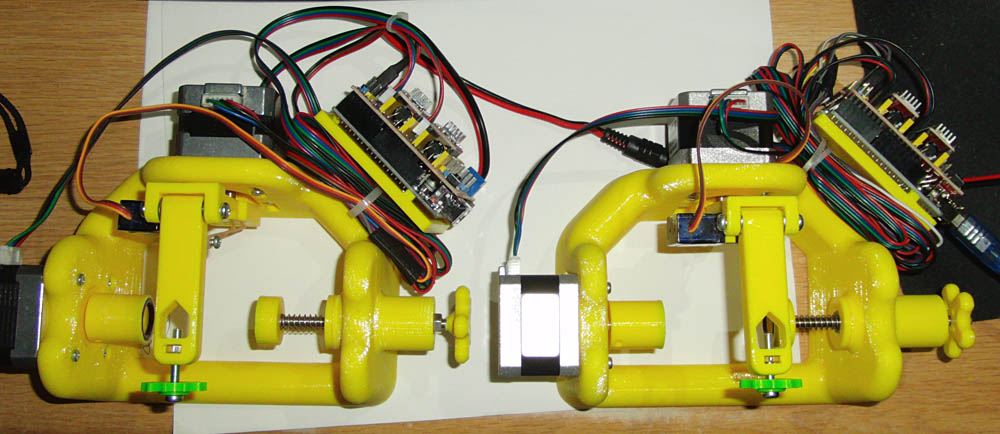
Ҳк‘МҢ^ӮМғtғҢҒ[ғҖӮНғpҒ[ғcҗ”ӮЖ’Іҗ®ғ–ҸҠӮӘҸӯӮИӮӯӮДҚПӮЮӮМӮЕҸнҒXҗ»ҚмӮөӮҪӮ©ӮБӮҪӮМӮҫӮӘҒAзSзOӮ·ӮйҢҙҲцӮЙӮИӮБӮДӮўӮҪӮМӮӘӮұӮМ•”•ӘҒB
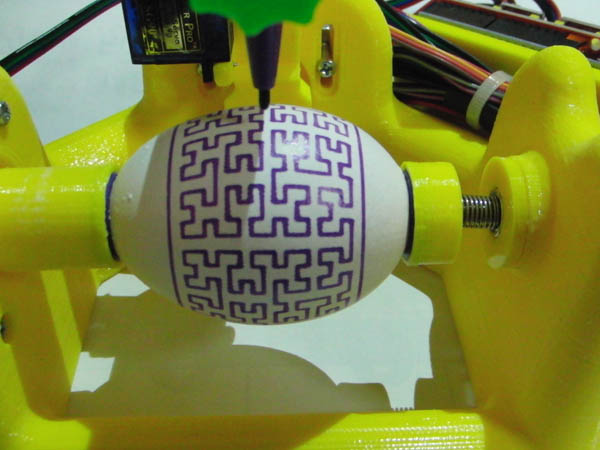
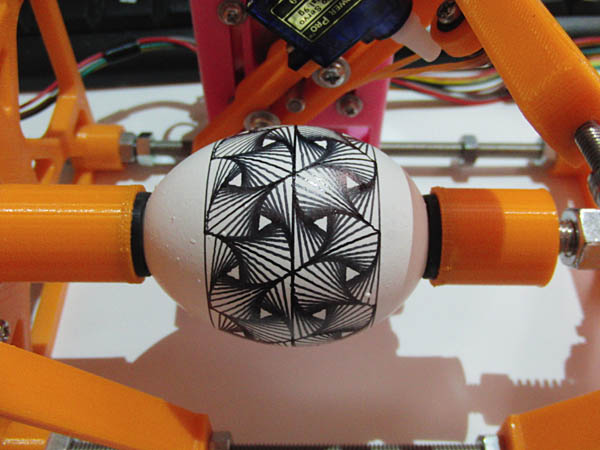
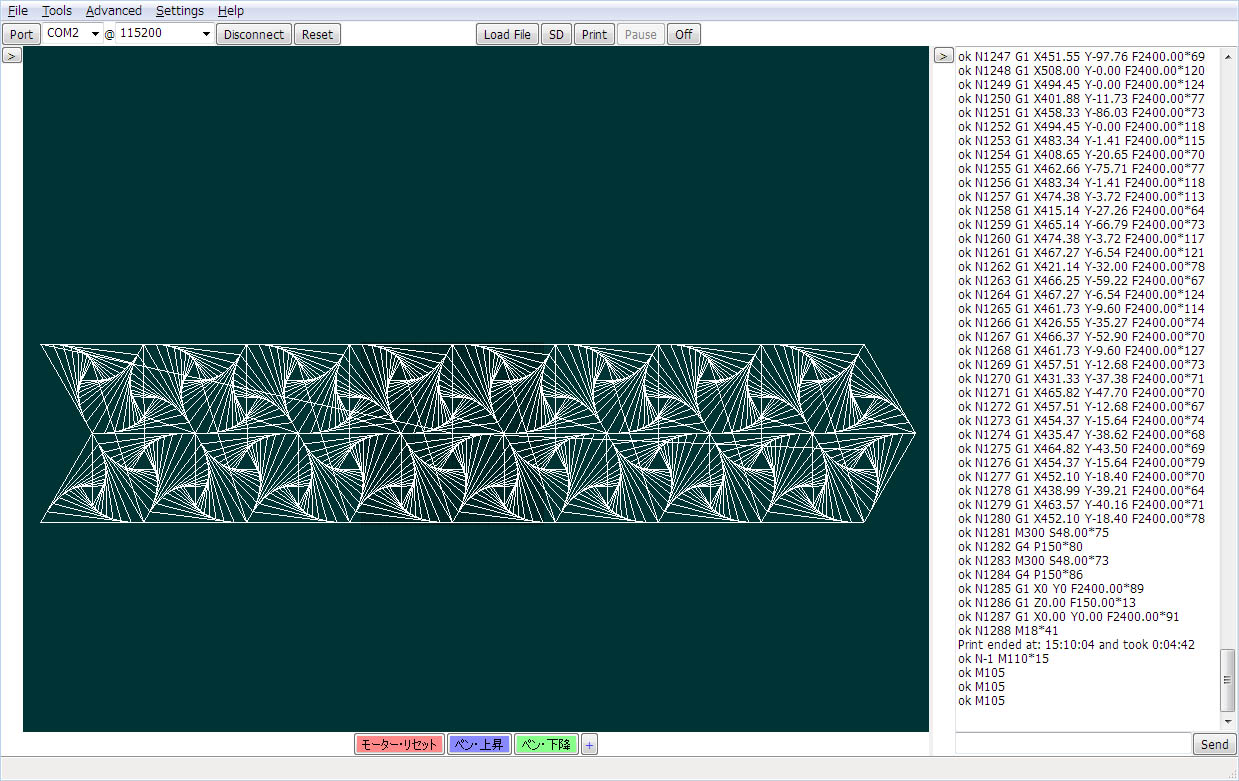
ғ^ғ}ғSӮМ•sӢПҚtӮИ‘Иү~ӮЙҗ}Ң`Ӯр•`ӮӯӮЖҸoӮй"ӮдӮӘӮЭ"ӮМҢyҢёӮЙӮНҗв‘О•K—vӮИZҚӮ’Іҗ®Ӣ@”\ҒB

ӮВӮГӮӯҒEҒEҒB




 “Y•tғtғ@ғCғӢ
“Y•tғtғ@ғCғӢ