|
پushape benderپvƒvƒ‰ƒOƒCƒ“‚ج‘±‚«پB
‹ï‘ج“I‚ب—ل‚ًژ¦‚³‚ب‚¢‚ج‚à"ƒAƒŒ"پi‚ـ‚½پIپj‚ب‚ج‚إپA
Kotaro—l‚ج"‘ٹ—ض"‚ج–ن—l‚ً—ûڈK—pƒfƒUƒCƒ“‚ئ‚µ‚ؤگ^ژ—‚³‚¹‚ؤ’¸‚«پA‚·‚ׂؤ3•ھپ`5•ھ’ِ“x‚إٹ®گ¬‚إ‚«‚éژQچlƒ‚ƒfƒ‹‚ًچىگ¬‚µ‚ؤ‚ف‚½پB
ƒVƒhƒچƒ‚ƒhƒچ‚ة‘€چى‚·‚é“®‰و‚و‚èگأژ~‰و‘œ‚ج•û‚ھƒXƒbƒLƒٹ‚·‚é‚ج‚إپAˆب‰؛پA‚·‚ׂؤگأژ~‰وپB
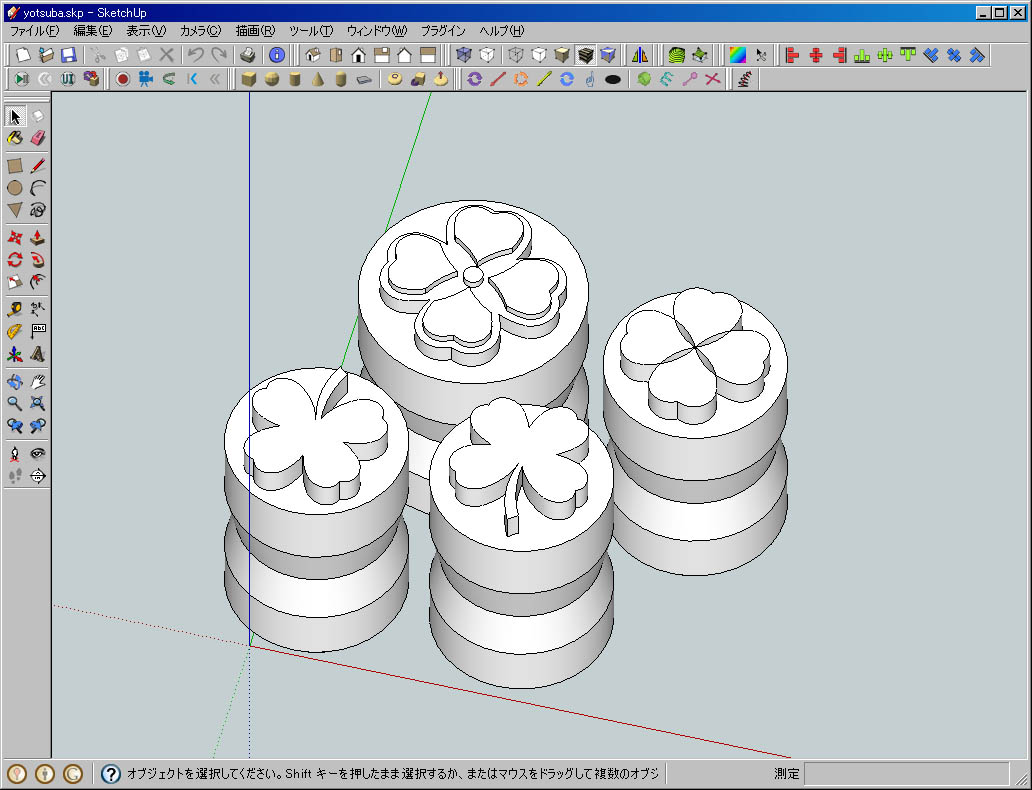
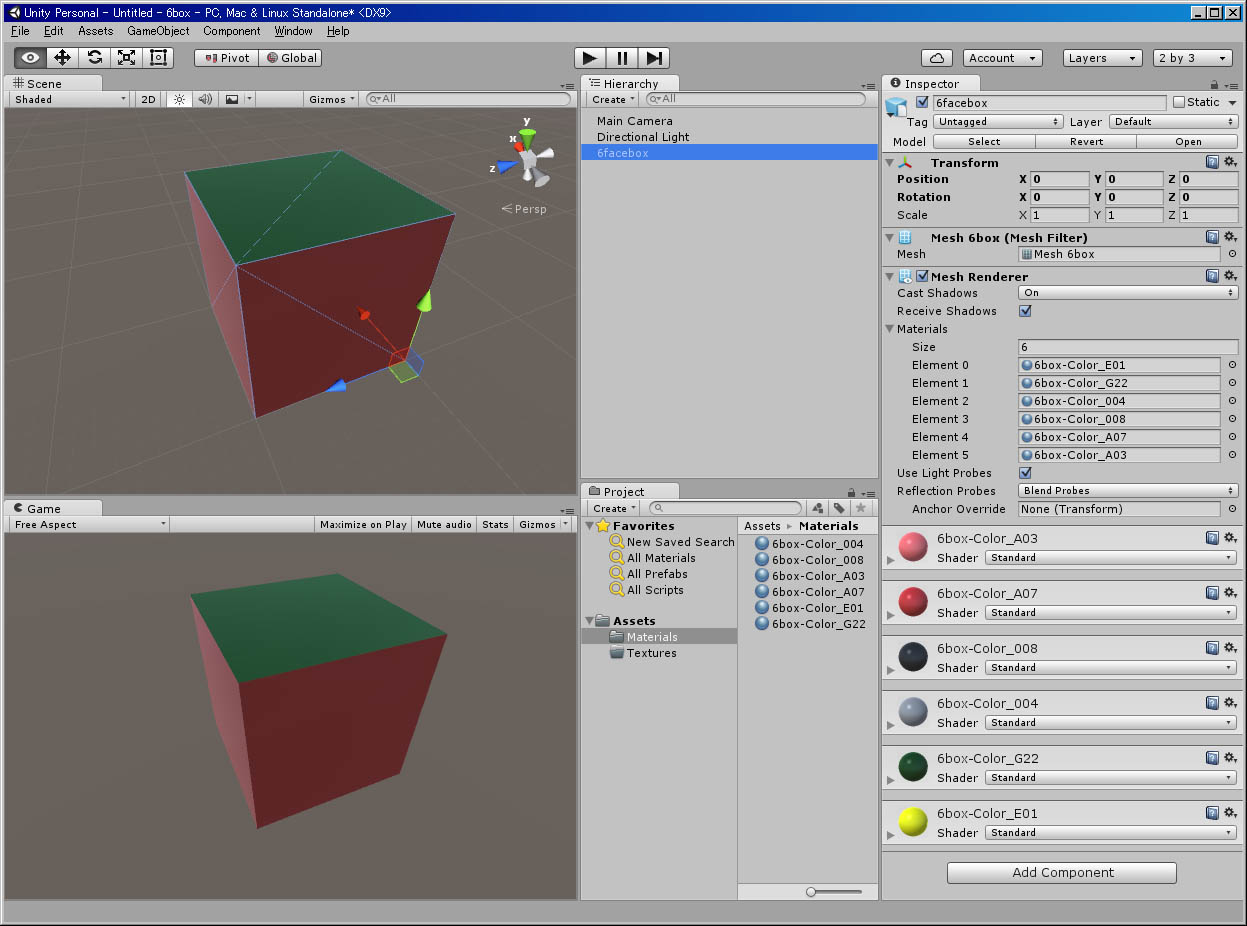
پyگ^ژ—‚³‚¹‚ؤ’¸‚¢‚½‘ٹ—ض–ن—l‚à‚ا‚«پi‹à‹ï’ِ“xپH‚جŒْ‚ف•t‚«پjپz
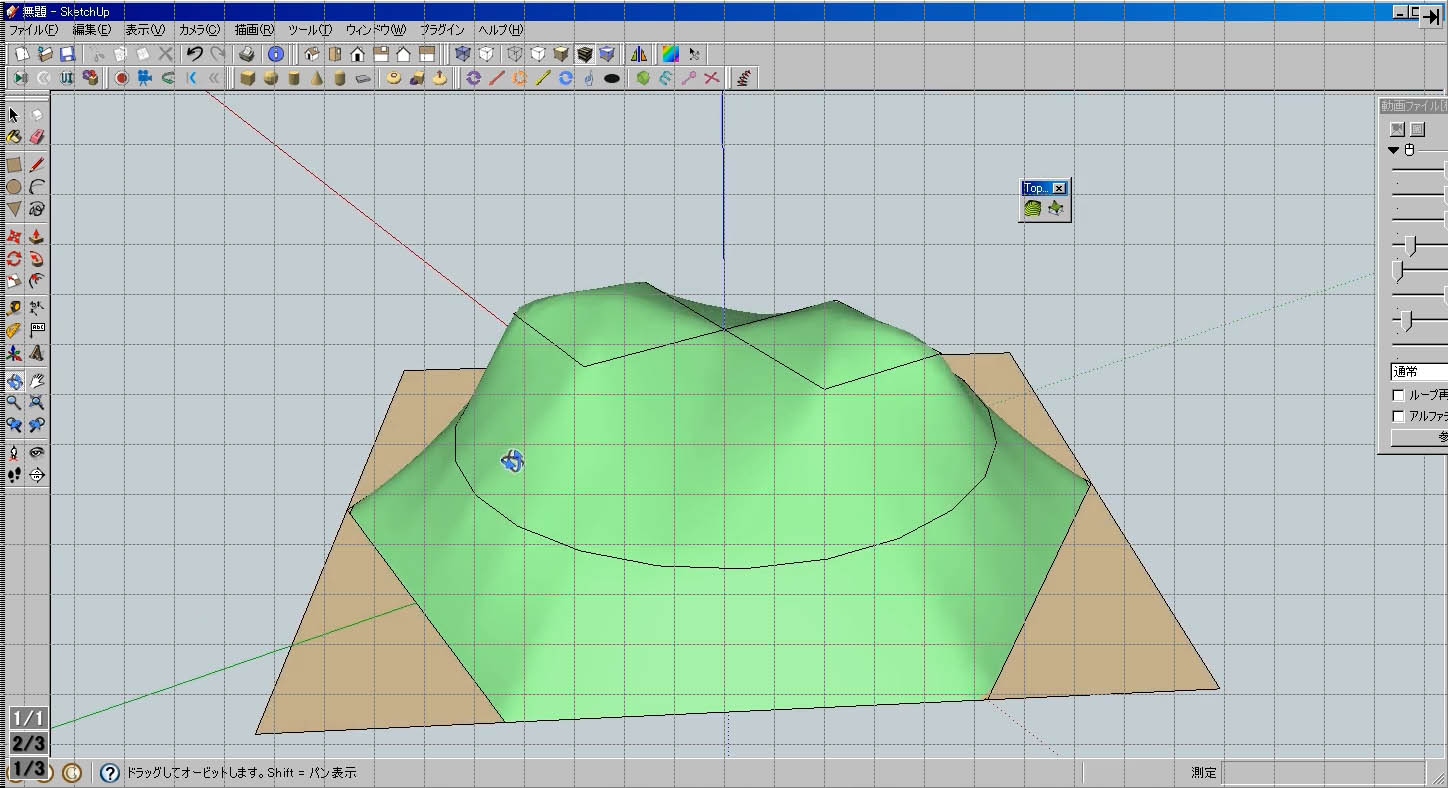
‰~Œتƒcپ[ƒ‹‚¾‚¯‚ًژg‚ء‚½“K“–‚بŒ`ڈَچىگ¬پB•ذ–تچى‚ء‚ؤƒ~ƒ‰پ[ڈˆ—پB“ٌ•ھ’ِ“xپB
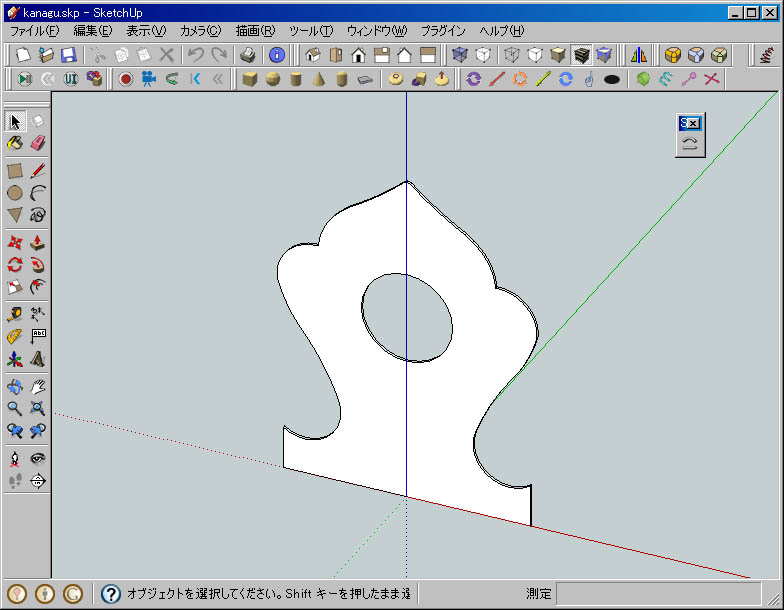
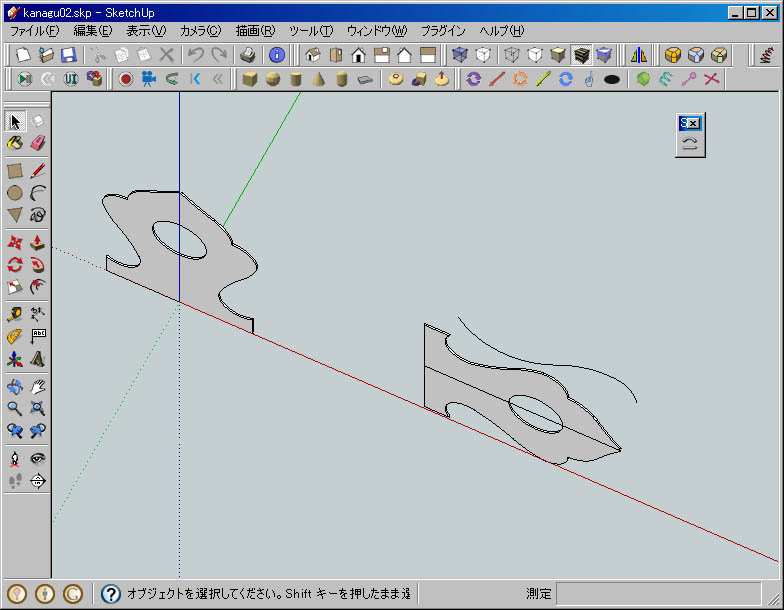
پy•½–ت‚إڈ‘‚¢‚½–ح—l‚ً‰،‚ةگQ‚©‚¹‚ؤˆê‰ٌ–ع‚جƒxƒ“ƒhپz
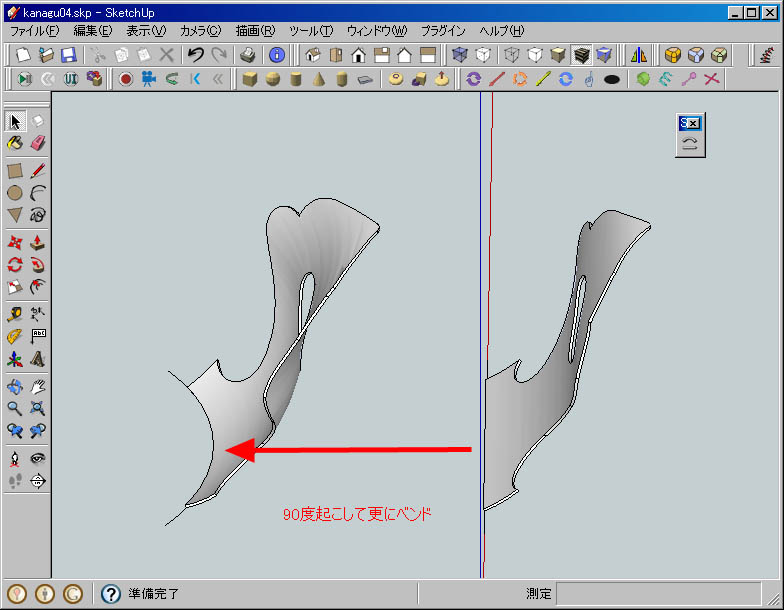
پyƒxƒ“ƒh‚µ‚½Œ`ڈَ‚ً90“x‹N‚±‚µ‚ؤپA“ٌ“x–ع‚جƒxƒ“ƒhپz
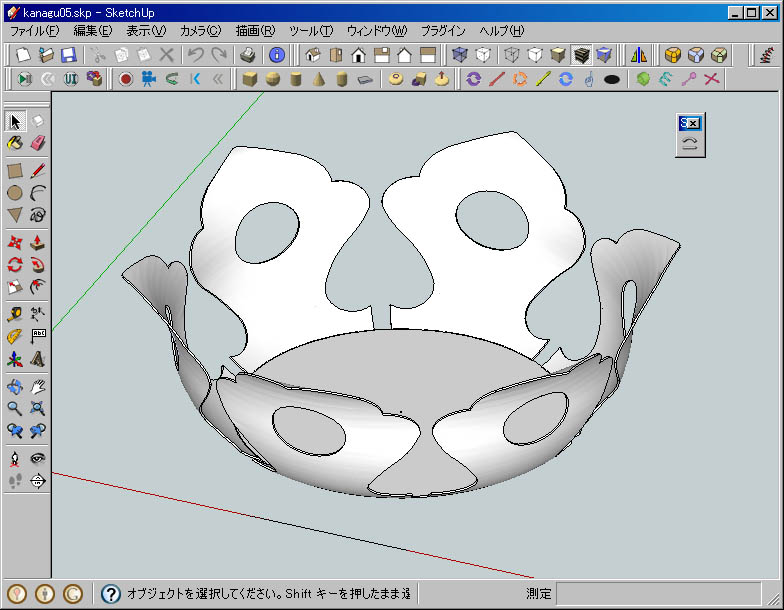
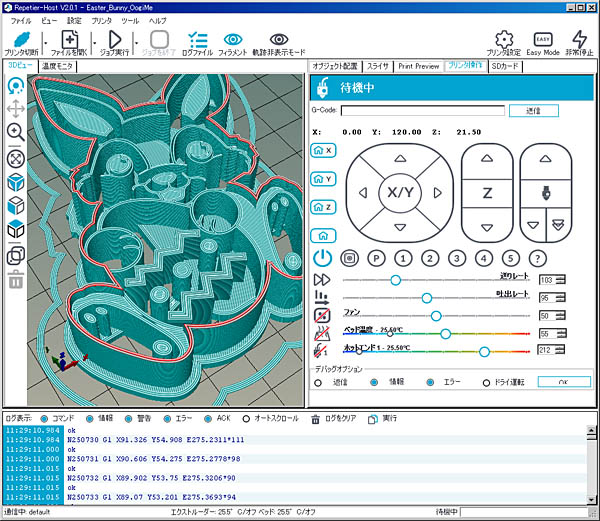
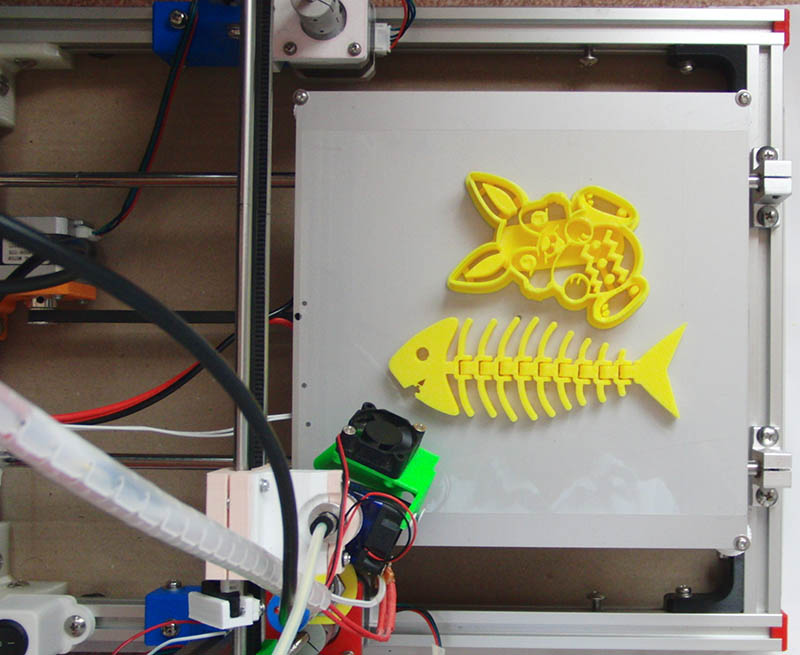
پy8–‡‚إ‰~‚ً•`‚‚و‚¤45“x*7‚ج‰ٌ“]ƒRƒsپ[پB’ê–ت‚ً•t‚¯پA–ح—l‚ًŒq‚°‚ؤ‘SچH’ِپA5•ھ’ِ“x‚إٹ®گ¬پIپz
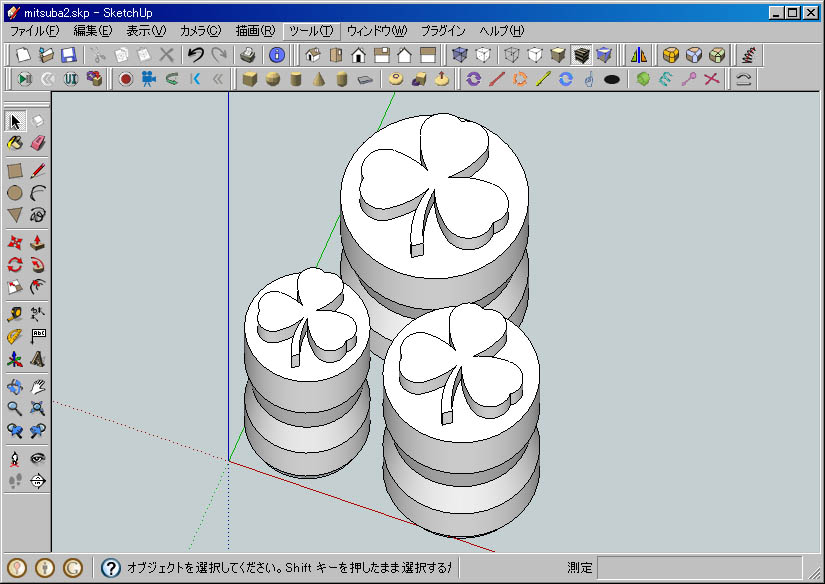
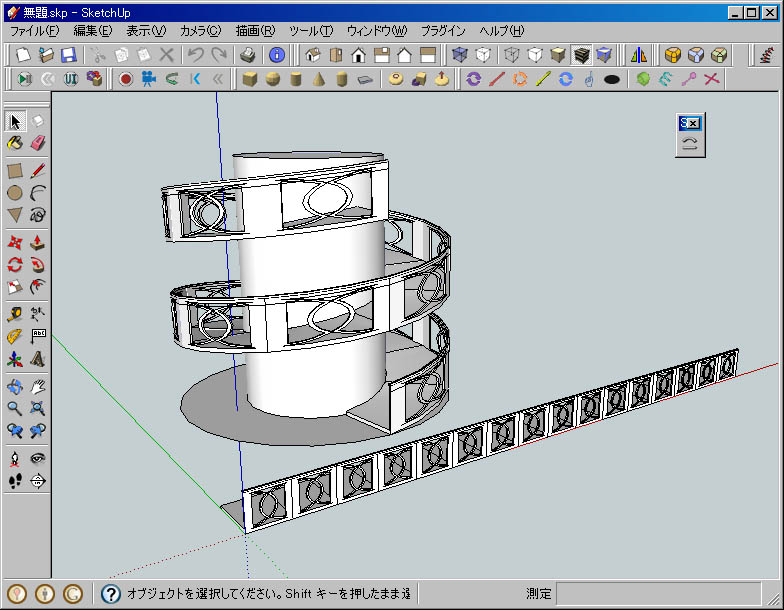
پy‚±‚ê‚à3•ھ’ِ“x‚إچىگ¬ڈo—ˆ‚éژè‚·‚è•t‚«—†گùƒXƒچپ[ƒvپBپz
 پ¦‰،گL‚ر‚µ‚½ژèگ ‚ًŒ©‚ؤپA•sگ³ٹm‚¾‚ئŒë‰ً‚µ‚ب‚¢‚و‚¤‚ةپB
پ¦‰،گL‚ر‚µ‚½ژèگ ‚ًŒ©‚ؤپA•sگ³ٹm‚¾‚ئŒë‰ً‚µ‚ب‚¢‚و‚¤‚ةپB
ƒGƒ“ƒeƒBƒeƒBڈî•ٌ‚ًŒ³‚ةپA—†گù‚جٹOژüگ،–@‚ئژèگ ƒ‚ƒfƒ‹‚جƒpپ[ƒcڈWچ‡گ،–@‚ًٹ®‘S‚ةˆê’v‚³‚¹‚éژ–‚حڈo—ˆ‚é‚ھپA–ت“|‚ب‚ج‚إڈب—ھ‚µ‚ؤ‚¢‚éپB
‚±‚ج‚و‚¤‚ب’Pڈƒ‚بƒ‚ƒfƒٹƒ“ƒO‚¾‚¯‚إ‚ب‚پAگ”•ھ’ِ“x‚جŒvژZژٹشپi‘ز‚؟ژٹشپj‚ًٹoŒه‚إ‚«‚ê‚خپAˆê“x‚ج‘€چى‚إ‚©‚ب‚è•،ژG‚بŒ`ڈَ‚جƒ‚ƒfƒٹƒ“ƒO‚à‰آ”\پB
|


 “Y•tƒtƒ@ƒCƒ‹
“Y•tƒtƒ@ƒCƒ‹