”j‘¹‚µ‚ؤ“’…‚µ‚½پuLCDپv‚ًˆّ‚«ڈo‚µ‚ة‚»‚ج‚ـ‚ـ•ْ’u‚µ‚ؤ‚ ‚ء‚½‚½‚كپA‚¾‚ٌ‚¾‚ٌ‚ئژè‹·‚ة‚ب‚èپA—ک—p‚·‚é•ûŒü‚ةٹپ‚ًگط‚ء‚½پB
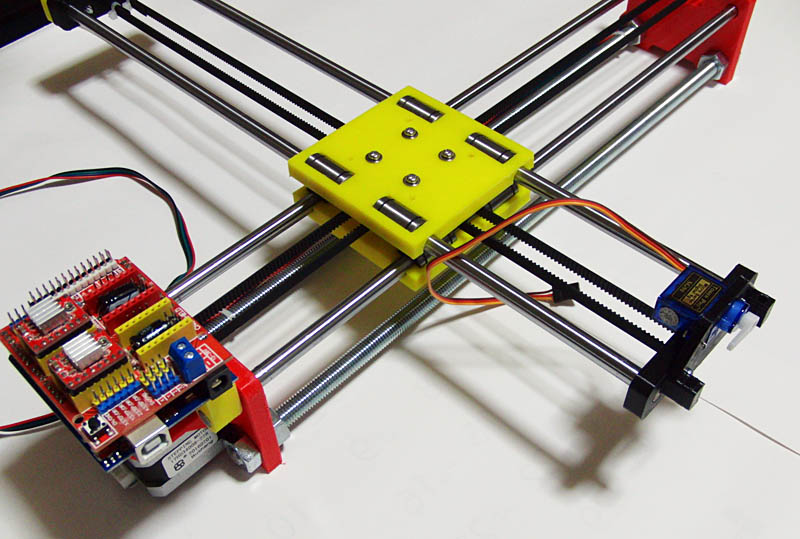
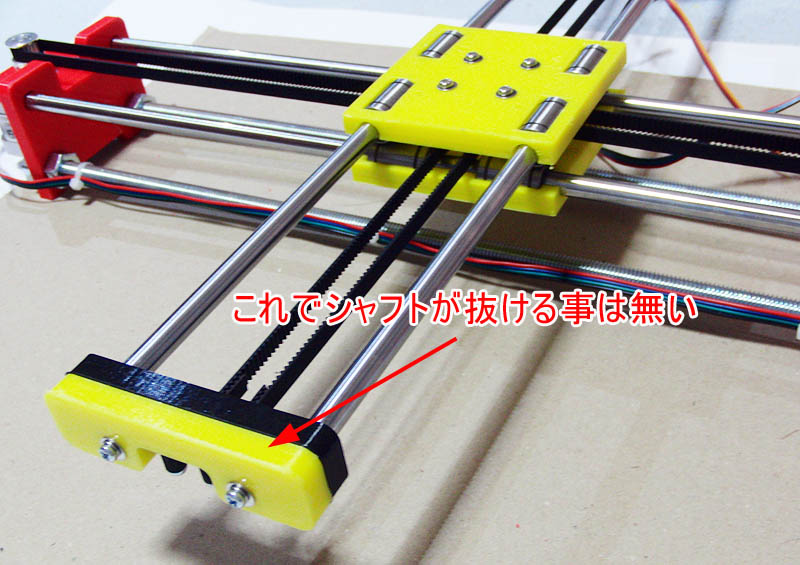
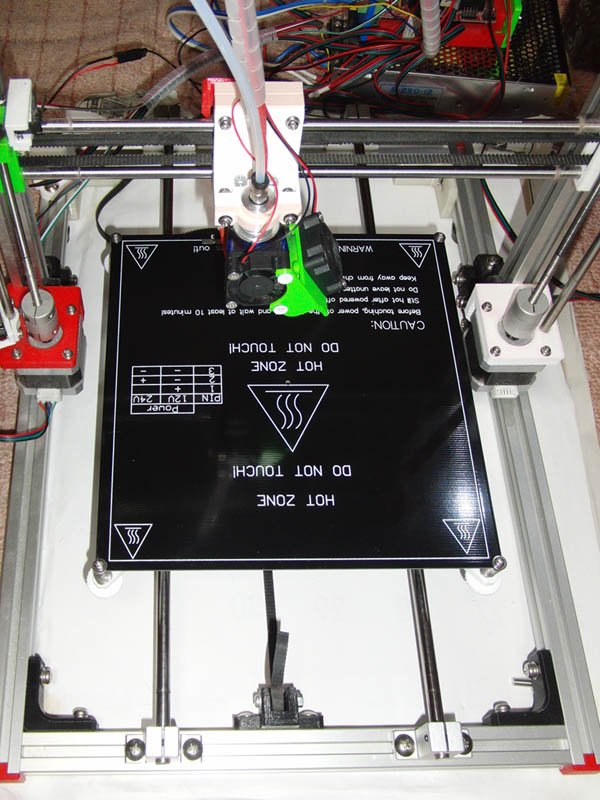
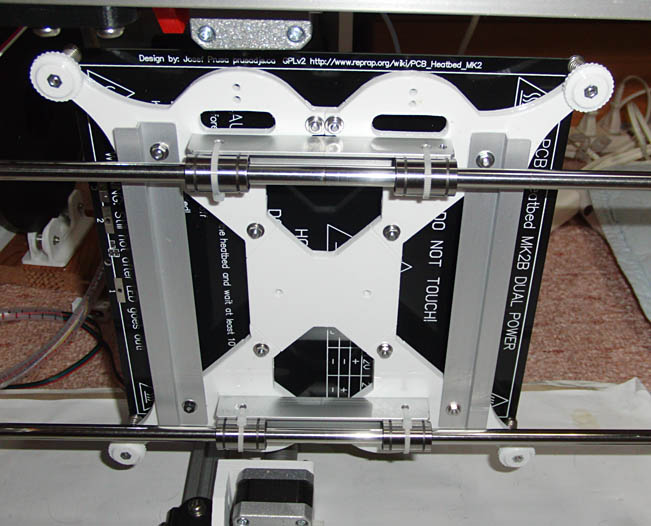
‚ـ‚¸‚حٹî”آ‚ھƒVƒ‡پ[ƒg‚µ‚ب‚¢’ِ“x‚جٹبˆصƒPپ[ƒX‚ًƒvƒٹƒ“ƒgپB
ژں‚ة‚±‚ê‚ـ‚إ—ک—p‚µ‚ؤ‚«‚½پuSprinterپv‚©‚çپAƒJƒi•\ژ¦‚ًƒTƒ|پ[ƒg‚µ‚½پuMerlinپv‚ضپuFirmwareپv‚جچع‚¹ٹ·‚¦پB
پuMerlinپv‚إ‚ج•دچX‰سڈٹ‚ھ‘½‚‚ؤپAƒ`ƒFƒbƒNکR‚ê‚ة‹C‚أ‚©‚¸ƒzپ[ƒ€ƒ|ƒWƒVƒ‡ƒ“‚ض“®چى‚³‚¹‚½ڈuٹشپA"ƒuƒqپ[ƒ“پI"‚ئŒ¾‚¤پA“–‚ؤ‚آ‚¯‚ھ‚ـ‚µ‚¢ˆظڈي‰¹‚ئ‚ئ‚à‚ةZژ²‚ئXژ²‚ھچ‚‘¬‚إˆع“®‚µپAƒXƒgƒbƒv‚·‚é‚ب‚ا‚جƒgƒ‰ƒuƒ‹‚à•،گ”‰ٌپB
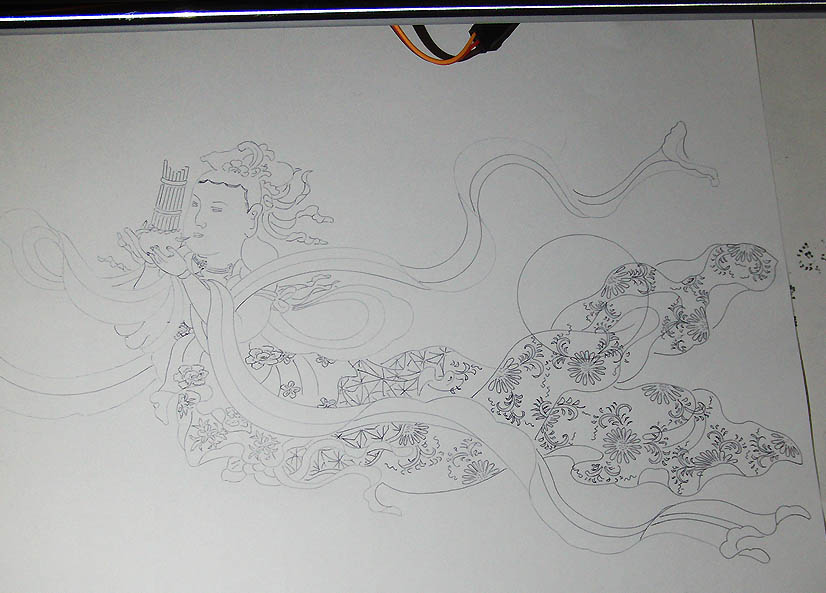
Œ»چفپA–³ژ–‚ةچى‹ئ‚ًڈI‚¦پAƒvƒٹƒ“ƒg‚ھچؤٹJ‚³‚ꂽپB
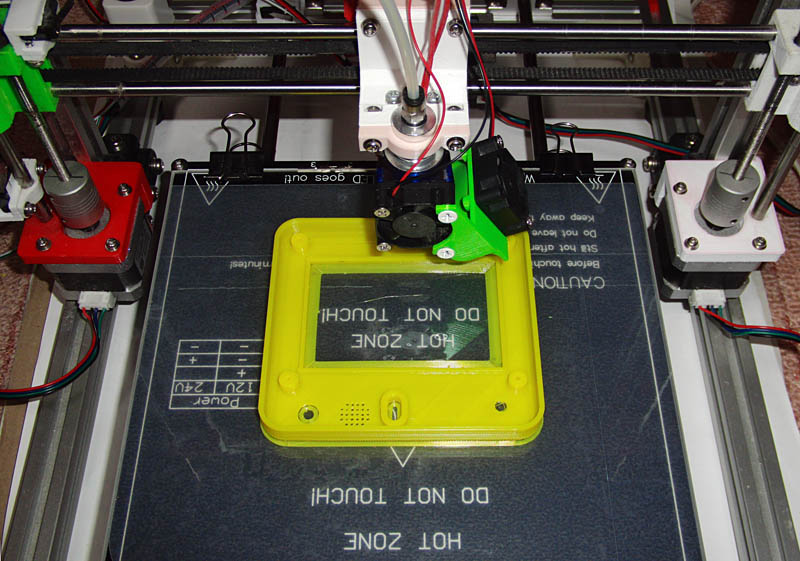
پyLCDƒpƒڈپ[ONپz

پy–³ژ–‚ةƒJƒi‚إ•\ژ¦‚³‚ꂽپz
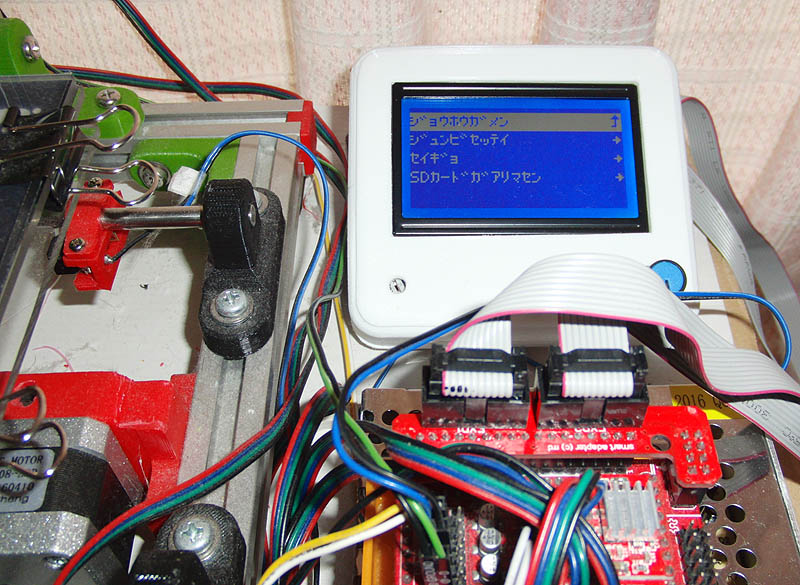
LCD‚ة•\ژ¦‚³‚ê‚éƒJƒiƒپƒjƒ…پ[‚جˆê——‚ً‰؛‚ةŒf‚°‚ؤ‚ف‚½پB
Œ‹چ\‚ ‚é‚à‚ٌ‚¾‚ئٹضگS‚·‚邱‚ئ•p‚èپB
----------------------------------------------------
// "ƒJپ[ƒhƒKƒ\ƒEƒjƒ…ƒEƒTƒŒƒ}ƒVƒ^" ("Card inserted")
// "ƒJپ[ƒhƒKƒAƒٹƒ}ƒZƒ“" ("Card removed")
// Max length 8 characters
// "ƒپƒCƒ“" ("Main")
// "ƒWƒhƒEƒJƒCƒV" ("Autostart")
// "ƒ‚پ[ƒ^پ[ƒfƒ“ƒQƒ“ ƒIƒt" ("Disable steppers")
// "ƒQƒ“ƒeƒ“ƒtƒbƒL" ("Auto home")
// "XƒWƒN ƒQƒ“ƒeƒ“ƒtƒbƒL" ("Home X")
// "YƒWƒN ƒQƒ“ƒeƒ“ƒtƒbƒL" ("Home Y")
// "ZƒWƒN ƒQƒ“ƒeƒ“ƒtƒbƒL" ("Home Z")
// "ƒQƒ“ƒeƒ“ƒtƒbƒLƒ`ƒ…ƒE" ("Homing XYZ")
// "ƒŒƒxƒٹƒ“ƒOƒJƒCƒV" ("Click to Begin")
// "ƒcƒMƒmƒ\ƒNƒeƒCƒeƒ“ƒw" ("Next Point")
// "ƒŒƒxƒٹƒ“ƒOƒJƒ“ƒٹƒ‡ƒE" ("Leveling Done!")
// "ƒgƒٹƒ„ƒپ" ("Cancel")
// "ƒLƒWƒ…ƒ“ƒIƒtƒZƒbƒgƒZƒbƒeƒC" ("Set home offsets")
// "ƒIƒtƒZƒbƒgƒKƒeƒLƒˆƒEƒTƒŒƒ}ƒVƒ^" ("Offsets applied")
// "ƒLƒWƒ…ƒ“ƒZƒbƒg" ("Set origin")
// "PLA ƒˆƒlƒc" ("Preheat PLA")
// "PLA ƒXƒxƒeƒˆƒlƒc" (" All")
// "PLA ƒxƒbƒhƒˆƒlƒc" (" Bed")
// "ƒZƒbƒeƒC" (" conf")
// "ABS ƒˆƒlƒc" ("Preheat ABS")
// "ABS ƒXƒxƒeƒˆƒlƒc" (" All")
// "ABS ƒxƒbƒhƒˆƒlƒc" (" Bed")
// "ƒZƒbƒeƒC" (" conf")
// "ƒJƒlƒcƒeƒCƒV" ("Cooldown")
// "ƒfƒ“ƒQƒ“ ƒIƒ“" ("Switch power on")
// "ƒfƒ“ƒQƒ“ ƒIƒt" ("Switch power off")
// "ƒIƒVƒ_ƒV" ("Extrude")
// "ƒqƒLƒRƒ~ƒZƒbƒeƒC" ("Retract")
// "ƒWƒNƒCƒhƒE" ("Move axis")
// "ƒxƒbƒhƒŒƒxƒٹƒ“ƒO" ("Level bed")
// "XƒWƒN ƒCƒhƒE" ("Move X")
// "YƒWƒN ƒCƒhƒE" ("Move Y")
// "ZƒWƒN ƒCƒhƒE" ("Move Z")
// "ƒGƒNƒXƒgƒ‹پ[ƒ_پ[" ("Extruder")
// "0.1mm ƒCƒhƒE" ("Move 0.1mm")
// " 1mm ƒCƒhƒE" ("Move 1mm")
// " 10mm ƒCƒhƒE" ("Move 10mm")
// "ƒ\ƒNƒh" ("Speed")
// "ZƒIƒtƒZƒbƒg" ("Bed Z")
// "ƒmƒYƒ‹" ("Nozzle")
// "ƒxƒbƒh" ("Bed")
// "ƒtƒ@ƒ“ƒ\ƒNƒh" ("Fan speed")
// "ƒgƒVƒ…ƒcƒٹƒ‡ƒE" ("Flow")
// "ƒZƒCƒMƒ‡" ("Control")
// " ƒTƒCƒeƒC" (" Min")
// " ƒTƒCƒRƒE" (" Max")
// " ƒtƒ@ƒNƒ^پ[" (" Fact")
// "ƒWƒhƒEƒIƒ“ƒhƒZƒCƒMƒ‡" ("Autotemp")
// "ƒWƒhƒEƒIƒ“ƒh" ("Autotemp")
// "ƒIƒ“ " ("On ")
// "ƒIƒt " ("Off")
// "ƒZƒ“ƒ^ƒN" ("Select")
// "ƒJƒ\ƒNƒh mm/s2" ("Accel")
// "XƒWƒN ƒ„ƒNƒh mm/s" ("Vx-jerk")
// "YƒWƒN ƒ„ƒNƒh mm/s" ("Vy-jerk")
// "ZƒWƒN ƒ„ƒNƒh mm/s" ("Vz-jerk")
// "ƒGƒNƒXƒgƒ‹پ[ƒ_پ[ ƒ„ƒNƒh" ("Ve-jerk")
// "ƒTƒCƒ_ƒCƒIƒNƒٹƒ\ƒNƒh " ("Vmax ")
// "ƒTƒCƒVƒ‡ƒEƒIƒNƒٹƒ\ƒNƒh" ("Vmin")
// "ƒTƒCƒVƒ‡ƒEƒCƒhƒEƒ\ƒNƒh" ("VTrav min")
// "ƒTƒCƒ_ƒCƒJƒ\ƒNƒh " ("Amax ")
// "ƒJƒ\ƒNƒh" ("Accel")
// "XYƒWƒN ƒ„ƒNƒh" ("Vx-jerk")
// "XYƒWƒN ƒ„ƒNƒh" ("Vy-jerk")
// "ZƒWƒN ƒ„ƒNƒh" ("Vz-jerk")
// "E ƒ„ƒNƒh" ("Ve-jerk")
// "maxƒIƒNƒٹƒ\ƒNƒh" ("Vmax ")
// "minƒIƒNƒٹƒ\ƒNƒh" ("Vmin")
// "minƒCƒhƒEƒ\ƒNƒh" ("VTrav min")
// "maxƒJƒ\ƒN " ("Amax ")
// "ƒqƒLƒRƒ~ƒJƒ\ƒNƒh" ("A-retract")
// "ƒCƒhƒEƒJƒ\ƒNƒh" ("A-travel")
// "ƒIƒ“ƒh" ("Temperature")
// "ƒEƒSƒLƒZƒbƒeƒC" ("Motion")
// "ƒtƒBƒ‰ƒپƒ“ƒg" ("Filament")
// "ƒtƒBƒ‰ƒپƒ“ƒgƒ`ƒ‡ƒbƒPƒC" ("Fil. Dia.")
// "ƒtƒBƒ‰ƒپƒ“ƒgƒPƒC" ("Fil. Dia.")
// "LCDƒRƒ“ƒgƒ‰ƒXƒg" ("LCD contrast")
// "ƒپƒ‚ƒٹƒwƒJƒNƒmƒE" ("Store memory")
// "ƒپƒ‚ƒٹƒJƒ‰ƒˆƒ~ƒRƒ~" ("Load memory")
// "ƒZƒbƒeƒCƒٹƒZƒbƒg" ("Restore failsafe")
// "ƒٹƒtƒŒƒbƒVƒ…" ("Refresh")
// "ƒWƒ‡ƒEƒzƒEƒKƒپƒ“" ("Info screen")
// "ƒWƒ…ƒ“ƒrƒZƒbƒeƒC" ("Prepare")
// "ƒ`ƒ‡ƒEƒZƒC" ("Tune")
// "ƒCƒ`ƒWƒeƒCƒV" ("Pause print")
// "ƒvƒٹƒ“ƒgƒTƒCƒJƒC" ("Resume print")
// "ƒvƒٹƒ“ƒgƒeƒCƒV" ("Stop print")
// "SDƒJپ[ƒhƒJƒ‰ƒvƒٹƒ“ƒg" ("Print from SD")
// "SDƒJپ[ƒhƒKƒAƒٹƒ}ƒZƒ“" ("No SD card")
// "ƒLƒ…ƒEƒV" ("Sleep...")
// "ƒVƒoƒ‰ƒNƒIƒ}ƒ`ƒNƒ_ƒTƒC" ("Wait for user...")
// "ƒvƒٹƒ“ƒgƒTƒCƒJƒC" ("Resuming print")
// "ƒvƒٹƒ“ƒgƒKƒ`ƒ…ƒEƒVƒTƒŒƒ}ƒVƒ^" ("Print aborted")
// "ƒEƒSƒLƒ}ƒZƒ“" ("No move.")
// "ƒqƒWƒ‡ƒEƒeƒCƒV" ("KILLED. ")
// "ƒeƒCƒVƒVƒ}ƒVƒ^" ("STOPPED. ")
// "ƒqƒLƒRƒ~ƒٹƒ‡ƒE mm" ("Retract mm")
// "ƒqƒLƒRƒ~ƒٹƒ‡ƒES mm" ("Swap Re.mm")
// "ƒqƒLƒRƒ~ƒ\ƒNƒh mm/s" ("Retract V")
// "ƒmƒYƒ‹ƒ^ƒCƒq mm" ("Hop mm")
// "ƒzƒVƒ‡ƒEƒٹƒ‡ƒE mm" ("UnRet +mm")
// "ƒzƒVƒ‡ƒEƒٹƒ‡ƒES mm" ("S UnRet+mm")
// "ƒzƒVƒ‡ƒEƒ\ƒNƒh mm/s" ("UnRet V")
// "ƒqƒLƒRƒ~ƒٹƒ‡ƒE" ("Retract mm")
// "ƒqƒLƒRƒ~ƒٹƒ‡ƒES" ("Swap Re.mm")
// "ƒqƒLƒRƒ~ƒ\ƒNƒh" ("Retract V")
// "ƒmƒYƒ‹ƒ^ƒCƒq" ("Hop mm")
// "ƒzƒVƒ‡ƒEƒٹƒ‡ƒE" ("UnRet +mm")
// "ƒzƒVƒ‡ƒEƒٹƒ‡ƒES" ("S UnRet+mm")
// "ƒzƒVƒ‡ƒEƒ\ƒNƒh" ("UnRet V")
// "ƒWƒhƒEƒqƒLƒRƒ~" ("AutoRetr.")
// "ƒtƒBƒ‰ƒپƒ“ƒgƒRƒEƒJƒ“" ("Change filament")
// "SDƒJپ[ƒhƒTƒCƒˆƒ~ƒRƒ~" ("Init. SD card")
// "SDƒJپ[ƒhƒRƒEƒJƒ“" ("Change SD card")
// "Zƒvƒچپ[ƒu ƒxƒbƒhƒKƒC" ("Z probe out. bed")
// "BLTouch ƒWƒRƒVƒ“ƒ_ƒ“" ("BLTouch Self-Test")
// "BLTouch ƒZƒ‹ƒtƒeƒXƒg" ("BLTouch Self-Test")
// "BLTouch ƒٹƒZƒbƒg" ("Reset BLTouch")
// "ƒTƒLƒj" ("Home") // Used as MSG_HOME " " MSG_X MSG_Y MSG_Z " " MSG_FIRST
// "ƒ’ƒtƒbƒLƒTƒZƒeƒNƒ_ƒTƒC" ("first")
// "ƒ’ƒtƒbƒLƒTƒZƒˆ" ("first")
// "ZƒIƒtƒZƒbƒg" ("Z Offset")
// "XƒWƒN ƒrƒhƒE" ("Babystep X")
// "YƒWƒN ƒrƒhƒE" ("Babystep Y")
// "ZƒWƒN ƒrƒhƒE" ("Babystep Z")
// "ƒCƒhƒEƒQƒ“ƒJƒCƒPƒ“ƒ`ƒLƒmƒE" ("Endstop abort")
// "ƒCƒhƒEƒQƒ“ƒJƒCƒPƒ“ƒ`" ("Endstop abort")
// "ƒJƒlƒcƒVƒbƒpƒC" ("Heating failed")
// "ƒGƒ‰پ[:ƒWƒ‡ƒEƒ`ƒ‡ƒEƒTپ[ƒ~ƒXƒ^پ[ƒLƒmƒE" ("Err: REDUNDANT TEMP")
// "ƒGƒ‰پ[:ƒWƒ‡ƒEƒ`ƒ‡ƒEƒTپ[ƒ~ƒXƒ^" ("Err: REDUNDANT TEMP")
// "ƒlƒcƒ{ƒEƒ\ƒE" ("THERMAL RUNAWAY")
// "ƒGƒ‰پ[:ƒTƒCƒRƒEƒIƒ“ƒ`ƒ‡ƒEƒJ" ("Err: MAXTEMP")
// "ƒGƒ‰پ[:ƒTƒCƒeƒCƒIƒ“ƒ~ƒ}ƒ“" ("Err: MINTEMP")
// "ƒGƒ‰پ[:ƒxƒbƒh ƒTƒCƒRƒEƒIƒ“ƒ`ƒ‡ƒEƒJ" ("Err: MAXTEMP BED")
// "ƒGƒ‰پ[:ƒxƒbƒh ƒTƒCƒeƒCƒIƒ“ƒ~ƒ}ƒ“" ("Err: MINTEMP BED")
// "ƒGƒ‰پ[:ƒxƒbƒh ƒTƒCƒRƒEƒIƒ“" ("Err: MAXTEMP BED")
// "ƒGƒ‰پ[:ƒxƒbƒh ƒTƒCƒeƒCƒIƒ“" ("Err: MINTEMP BED")
// "ƒTƒLƒj XY ƒ’ƒtƒbƒLƒTƒZƒeƒNƒ_ƒTƒC" or "ƒTƒLƒj XY ƒ’ƒtƒbƒLƒTƒZƒˆ" ("G28 Z Forbidden")
// "ƒvƒٹƒ“ƒ^پ[ƒnƒeƒCƒVƒVƒ}ƒVƒ^" ("PRINTER HALTED")
// "ƒٹƒZƒbƒgƒVƒeƒNƒ_ƒTƒC" ("Please reset")
// One character only
// One character only
// One character only
// "ƒJƒlƒcƒ`ƒ…ƒE" ("Heating...")
// "ƒJƒlƒcƒJƒ“ƒٹƒ‡ƒE" ("Heating done.")
// "ƒxƒbƒh ƒJƒlƒcƒ`ƒ…ƒE" ("Bed Heating.")
// "ƒxƒbƒh ƒJƒlƒcƒJƒ“ƒٹƒ‡ƒE" ("Bed done.")
// "ƒfƒ‹ƒ^ ƒRƒEƒZƒC" ("Delta Calibration")
// "XƒWƒN ƒRƒEƒZƒC" ("Calibrate X")
// "YƒWƒN ƒRƒEƒZƒC" ("Calibrate Y")
// "ZƒWƒN ƒRƒEƒZƒC" ("Calibrate Z")
// "ƒ`ƒ…ƒEƒVƒ“ ƒRƒEƒZƒC" ("Calibrate Center")
// "ƒRƒmƒvƒٹƒ“ƒ^پ[ƒjƒcƒCƒe" ("About Printer")
// "ƒvƒٹƒ“ƒ^پ[ƒWƒ‡ƒEƒzƒE" ("Printer Info")
// "ƒvƒٹƒ“ƒgƒWƒ‡ƒEƒLƒ‡ƒE" ("Printer Stats")
// "ƒZƒCƒMƒ‡ƒPƒCƒWƒ‡ƒEƒzƒE" ("Board Info")
// "ƒTپ[ƒ~ƒXƒ^پ[" ("Thermistors")
// "ƒGƒNƒXƒgƒ‹پ[ƒ_پ[ƒXƒE" ("Extruders")
// "ƒ{پ[ƒŒپ[ƒg" ("Baud")
// "ƒvƒچƒgƒRƒ‹" ("Protocol")
// "ƒLƒ‡ƒEƒ^ƒCƒiƒCƒVƒ‡ƒEƒپƒC ƒIƒ“" ("Case light on")
// "ƒLƒ‡ƒEƒ^ƒCƒiƒCƒVƒ‡ƒEƒپƒC ƒIƒt" ("Case light off")
// "ƒvƒٹƒ“ƒgƒXƒE" ("Print Count")
// "ƒJƒ“ƒٹƒ‡ƒEƒXƒE" ("Completed")
// "ƒvƒٹƒ“ƒgƒWƒJƒ“ƒ‹ƒCƒPƒC" ("Total print time")
// "ƒTƒCƒ`ƒ‡ƒEƒvƒٹƒ“ƒgƒWƒJƒ“" ("Longest job time")
// "ƒtƒBƒ‰ƒپƒ“ƒgƒVƒˆƒEƒٹƒ‡ƒEƒ‹ƒCƒPƒC" ("Extruded total")
// "ƒtƒBƒ‰ƒپƒ“ƒgƒ\ƒEƒVƒˆƒEƒٹƒ‡ƒE" ("Extruded")
// "ƒZƒbƒeƒCƒTƒCƒeƒCƒIƒ“" ("Min Temp")
// "ƒZƒbƒeƒCƒTƒCƒRƒEƒIƒ“" ("Max Temp")
// "ƒfƒ“ƒQƒ“ƒVƒ…ƒxƒc" ("Power Supply")
// "ƒfƒ“ƒQƒ“" ("Power Supply")
// "ƒ‚پ[ƒ^پ[ƒNƒhƒEƒٹƒ‡ƒN" ("Drive Strength")
// "DACƒVƒ…ƒcƒٹƒ‡ƒN %" ("Driver %")
// "DACƒVƒ…ƒcƒٹƒ‡ƒN" ("Driver %")
// "ƒپƒ‚ƒٹƒwƒJƒNƒmƒE" ("DAC EEPROM Write")
// "ƒtƒBƒ‰ƒپƒ“ƒgƒRƒEƒJƒ“" ("CHANGE FILAMENT")
// "ƒhƒEƒTƒ’ƒZƒ“ƒ^ƒNƒVƒeƒNƒ_ƒTƒC" ("CHANGE OPTIONS:")
// "ƒTƒ‰ƒjƒIƒVƒ_ƒX" ("Extrude more")
// "ƒvƒٹƒ“ƒgƒTƒCƒJƒC" ("Resume print")
// "ƒRƒEƒJƒ“ƒ’ƒJƒCƒVƒVƒ}ƒX" ("Wait for start")
// "ƒVƒoƒ‰ƒNƒIƒ}ƒ`ƒNƒ_ƒTƒC" ("of the filament")
// "ƒtƒBƒ‰ƒپƒ“ƒgƒkƒLƒ_ƒVƒ`ƒ…ƒE" ("Wait for")
// "ƒVƒoƒ‰ƒNƒIƒ}ƒ`ƒNƒ_ƒTƒC" ("filament unload")
// "ƒtƒBƒ‰ƒپƒ“ƒgƒ’ƒ\ƒEƒjƒ…ƒEƒV," ("Insert filament")
// "ƒNƒٹƒbƒNƒXƒ‹ƒgƒ]ƒbƒRƒEƒVƒ}ƒX" ("and press button")
// "ƒtƒBƒ‰ƒپƒ“ƒgƒ\ƒEƒeƒ“ƒ`ƒ…ƒE" ("Wait for")
// "ƒVƒoƒ‰ƒNƒIƒ}ƒ`ƒNƒ_ƒTƒC" ("filament load")
// "ƒtƒBƒ‰ƒپƒ“ƒgƒIƒVƒ_ƒVƒ`ƒ…ƒE" ("Wait for")
// "ƒVƒoƒ‰ƒNƒIƒ}ƒ`ƒNƒ_ƒTƒC" ("filament extrude")
// "ƒvƒٹƒ“ƒgƒ’ƒTƒCƒJƒCƒVƒ}ƒX" ("Wait for print")
// "ƒVƒoƒ‰ƒNƒIƒ}ƒ`ƒNƒ_ƒTƒC" ("to resume")
// "ƒRƒEƒJƒ“ƒ’ƒJƒCƒVƒVƒ}ƒX" ("Please wait...")
// "ƒtƒBƒ‰ƒپƒ“ƒgƒkƒLƒ_ƒVƒ`ƒ…ƒE" ("Ejecting...")
// "ƒ\ƒEƒjƒ…ƒEƒV,ƒNƒٹƒbƒNƒVƒeƒNƒ_ƒTƒC" ("Insert and Click")
// "ƒ\ƒEƒjƒ…ƒEƒV,ƒNƒٹƒbƒNƒZƒˆ" ("Insert and Click")
// "ƒtƒBƒ‰ƒپƒ“ƒgƒ\ƒEƒeƒ“ƒ`ƒ…ƒE" ("Loading...")
// "ƒtƒBƒ‰ƒپƒ“ƒgƒIƒVƒ_ƒVƒ`ƒ…ƒE" ("Extruding...")
// "ƒvƒٹƒ“ƒgƒ’ƒTƒCƒJƒCƒVƒ}ƒX" ("Resuming...")
----------------------------------------------------


 “Y•tƒtƒ@ƒCƒ‹
“Y•tƒtƒ@ƒCƒ‹