|
پuExport Animationپv‚إڈ‘‚«‚¾‚µ‚½کA‘±‰و‘œ‚ًپAƒtƒٹپ[‚ج
پuAviUtlپv‚ًژg‚ء‚ؤپuAVIپv“®‰وƒtƒ@ƒCƒ‹‚ئ‚µ‚ؤڈ‘‚«ڈo‚·ژèڈ‡‚ً‰و‘œ‚إŒfچع‚µ‚ؤ‚ف‚½پB
—ک—p‚³‚¹‚ؤ’¸‚¢‚½پh3Dƒ‚ƒfƒ‹پh‚حپA–ˆ‰ٌ‚¨گ¢کb‚ة‚ب‚ء‚ؤ‚¢‚éپA
kotarouپ@پ`3Dپ`—l‚ھچىگ¬‚µ‚½پAŒXژخ’n‚ةŒڑ‚ؤ‚½ƒpƒmƒ‰ƒ}“W–]‚ھٹy‚µ‚ك‚éپA‰~“›Œ`‚جŒڑ•¨پB
کA‘±‰و‘œ‚ًپuچؤˆ³ڈk‚ب‚µپv‚جپuAVIپv“®‰و‚ئ‚µ‚ؤڈ‘‚«ڈo‚·ڈêچ‡پA‹ح‚©ˆê•ھ‚½‚炸‚ج“®‰و‚إ‚àƒMƒK’Pˆت‚ج—v—ج‚ً”ï‚â‚·‚½‚كپAپuHDDپv‚ةڈ\•ھ‚ب‹َ‚«—e—ت‚ھ•K—v‚ئ‚ب‚éپB
1...پuAviUtlپv‚ً‹N“®‚µ‚½‚çپAپuƒtƒ@ƒCƒ‹پvƒپƒjƒ…پ[‚©‚çپuٹJ‚(Ctrl+O)پv‚ً‘I‘ً
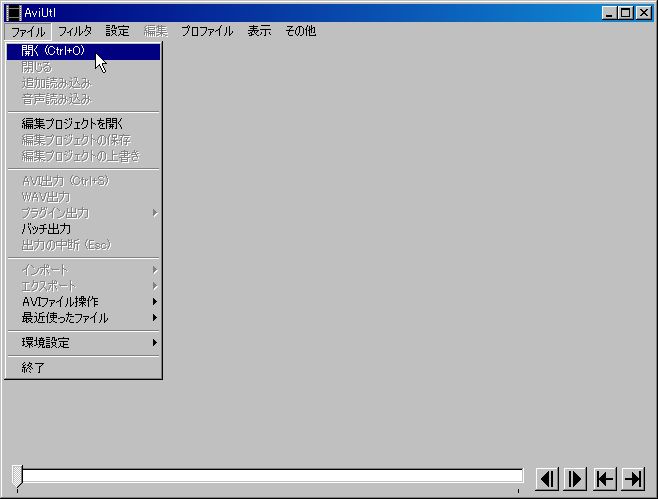
2...پuExport Animationپv‚إڈ‘‚«‚¾‚µ‚½پAکA”ش•t‚«‰و‘œ‚جپAˆê”شژل‚¢”شچ†‚ًژw’èپiƒ[ƒچ‚©‚çپj

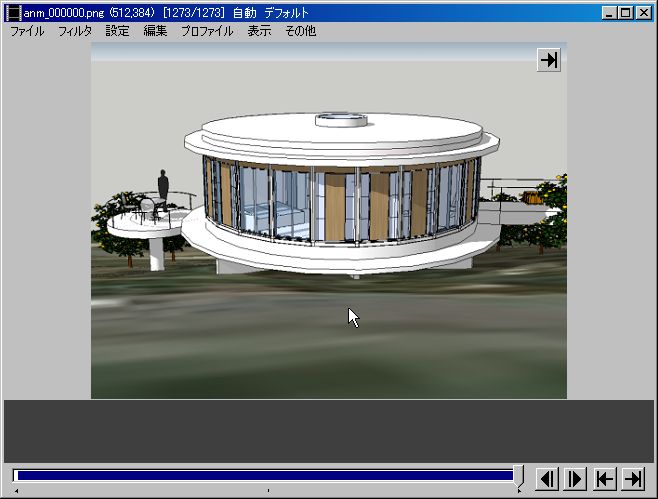
3...“ا‚فچ‚ـ‚ê‚ؤ•\ژ¦‚³‚ꂽ‰و‘œپB

4...چ،‰ٌ‚حپAƒTƒCƒY•دچX–³‚µپB

5...پuƒtƒ@ƒCƒ‹پvƒپƒjƒ…پ[‚©‚çپAپuAVIڈo—ح(Ctrl+S)پv‚ً‘I‘ًپB

6..ٹJ‚¢‚½ƒ_ƒCƒAƒچƒO‚©‚çپAƒtƒ@ƒCƒ‹–¼‚ئپAچؤˆ³ڈk‚ب‚µ‚ةƒ`ƒFƒbƒN‚ً“ü‚êپA“®‰و‚ًڈ‘‚«ڈo‚·پB

7...“®‰و‚جڈ‘‚«ڈo‚µ‚ھڈI‚ي‚é‚ئپAƒXƒ‰ƒCƒ_پ[‚ھچإŒم‚جƒVپ[ƒ“‚إژ~‚ـ‚éپB
ˆبڈمپAٹب’P‚¾‚ھپA‚±‚ê‚إپuAVIپvƒtƒ@ƒCƒ‹‚ھچىگ¬‚³‚ê‚éپB
‚چ‚گ‚S‚ب‚ا‚جƒRپ[ƒfƒbƒN‚ً“ü‚ê‚ؤ‚¢‚éڈêچ‡پA’¼گع‚چ‚گ‚S‚إڈ‘‚«ڈo‚µ‚ؤ‚à—ا‚¢پB
‰؛‚ھپAژہچغ‚ةڈ‘‚«ڈo‚µ‚ؤ‚ف‚½“®‰و
Œڑ•¨‚ج”ü‚µ‚³‚¾‚¯‚إ‚ب‚پA‰e‚âپA“ْچ·‚µ‚ج“®‚«‚ة‚à’چ–ع‚µ‚ؤ‚ظ‚µ‚¢پB
|




 “Y•tƒtƒ@ƒCƒ‹
“Y•tƒtƒ@ƒCƒ‹